

RDS3135 เซอร์โวมอเตอร์แรงบิดสูง ให้แรงบิดมากถึง 35 กิโลกรัมเซนติเมตร ต่อยอดพลกำลังมาจากรุ่น RDS3115 มาอีกขั้น ด้วยหัวใจหลักที่มาจากมอเตอร์ coreless รอบจัด ทดรอบด้วยเฟืองโลหะทั้งหมด ทำงานได้ที่แรงดัน 6V-8.4V เหมาะกับแบตเตอรี่ Li-Po 2เซลพอดี มาพร้อมกับแขนอลูมิเนียมที่สามารถประยุกต์กับการสร้างหุ่นยนต์หรือแขนกลต่างๆ ได้โดยง่าย
คุณสมบัติ
- ใช้ชุดเฟืองเป็นเฟืองโลหะ แข็งแรงทนทาน
- มีชุดลูกปืน 2 ชุดที่เฟืองตัวสุดท้าย
- ขณะทำงาน สามารถควงบคุมตำแหน่งได้ 180 องศา
- ขณะไม่ทำงาน สามารถหมุนโครงสร้างได้ 360 องศา
- มีวงจรควบคุมและวงจรขับด้วย MOSFET
- ด้านล่างของเซอร์โวมีจุดยึดแกนหมุนอิสระ
- เสียงขณะทำงานมีน้อยมาก
- ขนาด (เฉพาะตัวเซอร์โว) 40x20x40.5 มิลลิเมตร
- ขนาด (เมื่อรวมแขนอลูมิเนียม) 40x20x40.5 มิลลิเมตร
- น้ำหนัก 60 กรัม
- ความยาวสาย 320 มิลลิเมตร
- ความเร็ว 0.13 วินาที/60 องศา ที่แรงดัน 7.4 โวลต์
- ความเร็ว 0.11 วินาที/60 องศา ที่แรงดัน 8.4 โวลต์
- แรงบิด 31 กิโลกรัมเซนติเมตร ที่แรงดัน 7.4 โวลต์
- แรงบิด 35 กิโลกรัมเซนติเมตร ที่แรงดัน 8.4 โวลต์
- ทำงานที่แรงดัน 6V ถึง 8.4V
- ค่า Dead Zone เพียง 3 ไมโครวินาที
อุปกรณ์ที่มีในชุด



![]()
![]()
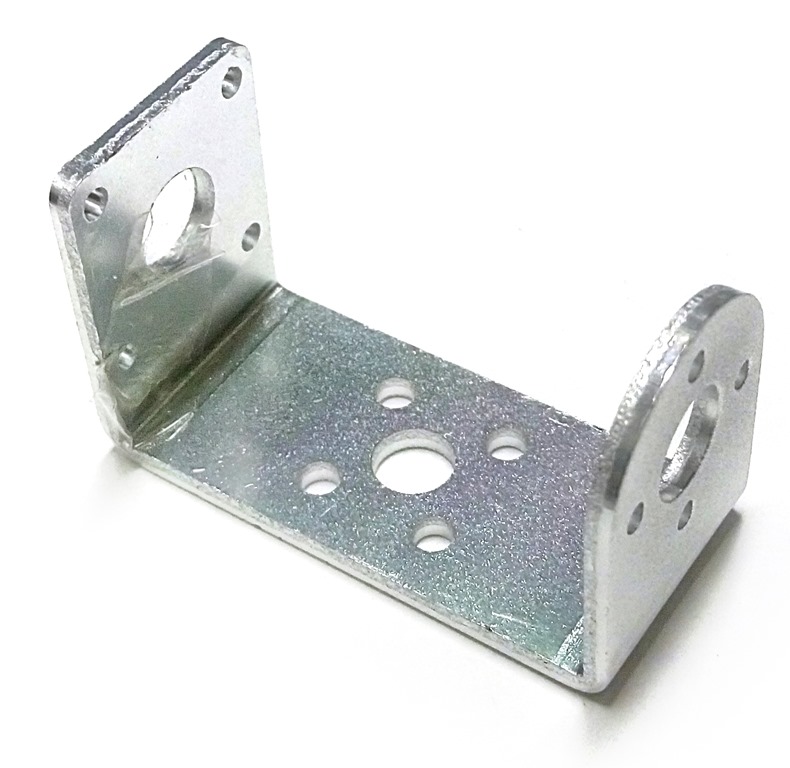
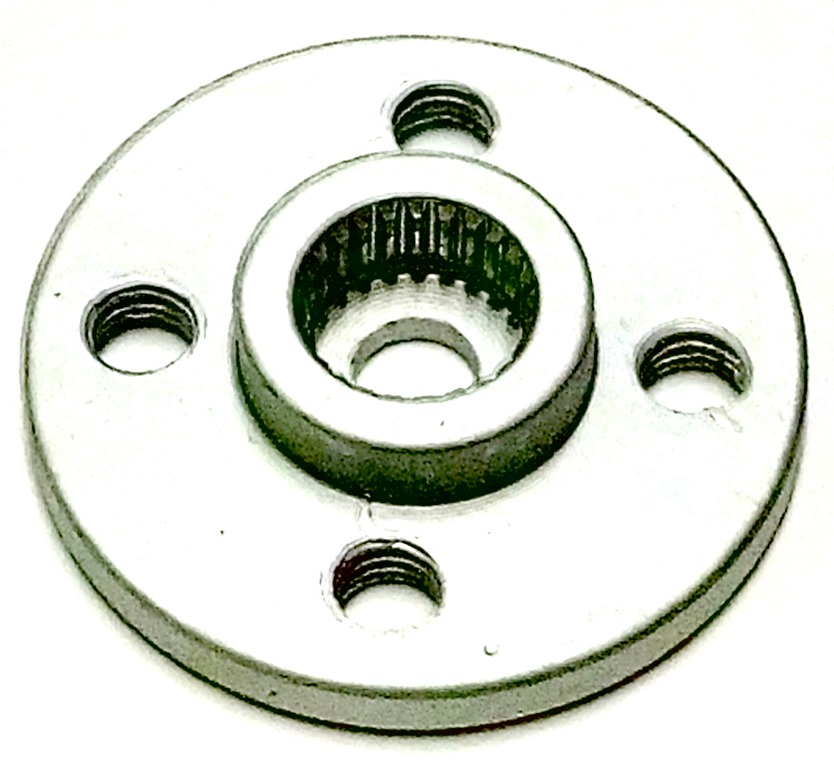
เซอร์โวมอเตอร์ x 1 ,แขนเซอร์โวใหญ่ x 1 , แขนเซอร์โวเล็ก x 1, ข้อต่อเซอร์โวมอเตอร์ด้านหมุนอิสระ x 1, ข้อต่อเซอร์โวมอเตอร์ด้านเฟือง x 1 ,สกรู 3×4 มม. x 8, สกรูเกลียวปล่อย 2 มม. x 7
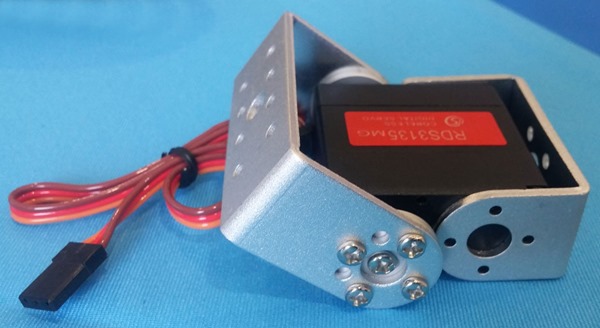
เมื่อประกอบเสร็จสมบูรณ์ จะมีลักษณะดังนี้

สายของเซอร์โวมอเตอร์
RDS3135 มีสายสีน้ำตาลแดงและส้ม โดย
- น้ำตาลเป็นขั้วลบ GND
- แดงเป็นขั้วบวก VCC
- ส้มเป็นขาสัญญาณ Signal
การเชื่อมต่อกับบอร์ดของ inex (POP-XT,POP-X2,IPST-SE,ATX2)
เซอร์โวมอเตอร์ต้องการพัลส์เพื่อส่งไปควบคุม โดยให้ค่าความกว้างพัลส์ช่วงบวกแปรผันกับตำแหน่งการหมุนของเซอร์โวมอเตอร์ การส่งสัญญาณนี้จะต้องทำตลอดเวลา ปกติจะทำงานอยู่เบื้องหลังผ่านอินเตอร์รัปต์ของไทเมอร์เคาน์เตอร์ ซึ่งบอร์ดของ inex มีไลบรารี่ servo เพื่อใช้งานกับเซอร์โวมอเตอร์ ติดตั้งไว้อยู่แล้ว โดยพิมพ์คำสั่ง
servo(CH,POS);
CH คือ ช่องเซอร์โวมอเตอร์
POS คือ ตำแหน่งที่ต้องการให้เซอร์โวมอเตอร์เคลื่อนที่ไป 0-180 ค่า -1 แทนการหยุดส่งค่าให้เซอร์โวมอเตอร์
ตัวอย่างการใช้งาน
#include <ipst.h> // IPST-SE Board
int x;
void setup() {
setTextSize(2);
glcdMode(1);
}
void loop() {
x=knob(180); // อ่านค่าจากตัวต้านทานปรับค่าได้
glcd(0,0,"POS=%d ",x); // แสดงค่าออกจอภาพ
servo(1,x); // ส่งค่าออกเซอร์โวมอเตอร์
}
จากตัวอย่าง ใช้งานเซอร์โวมอเตอร์ช่อง 1 นำค่าที่อ่านได้จากตัวต้านทานปรับค่าได้ (knob) ส่งค่าแสดงที่หน้าจอ GLCD พร้อมทั้งส่งค่าไปที่เซอร์โวมอเตอร์ด้วย