
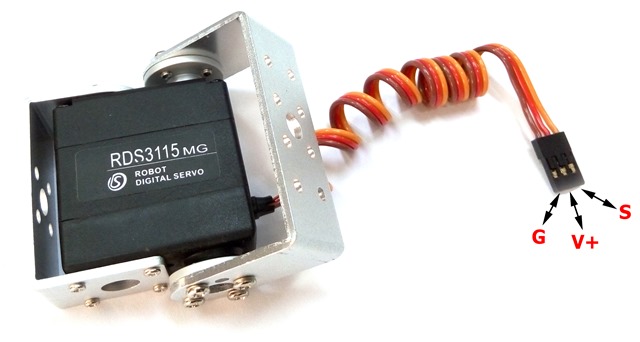
แนะนำการใช้งานเซอร์โวมอเตอร์รุ่น RDS3115

RDS3115 เป็นเซอร์โวมอเตอร์แรงบิดสูงให้แรงบิดมากถึง 15 กิโลกรัมเซนติเมตร ภายในเป็นเฟืองโลหะทั้งหมด มีความแข็งแรงสูง มาพร้อมกับแขนอลูมิเนียมที่สารถประยุกต์กับการสร้างหุ่นยนต์หรือแขนกลต่างๆ ได้โดยง่าย
โดยเซอร์โวตัวนี้จะใช้อยู่ในชุดแขนจับ SM-Gripper XT

คุณสมบัติ
- ใช้ชุดเฟืองทั้งหมดเป็นเฟืองโลหะ
- ขณะทำงาน สามารถควงบคุมตำแหน่งได้ 270 องศา
- ขณะไม่ทำงาน สามารถหมุนโครงสร้างได้ 360 องศา
- มีชุดลูกปืน 2 ชุดที่เฟืองตัวสุดท้าย
- มีวงจรควบคุมและวงจรขับด้วย MOSFET
- ด้านล่างของเซอร์โวมีจุดยึดแกนหมุนอิสระ
- เสียงขณะทำงานมีน้อยมาก
- ขนาด (เฉพาะตัวเซอร์โว) 40x20x40.5 มิลลิเมตร
- ขนาด (เมื่อรวมแขนอลูมิเนียม) 40x20x40.5 มิลลิเมตร
- น้ำหนัก 60 กรัม
- ความยาวสาย 320 มิลลิเมตร
- ความเร็ว 0.16 วินาที/60 องศา ที่แรงดัน 6 โวลต์
- ความเร็ว 0.14 นาที/60 องศา ที่แรงดัน 7.2 โวลต์
- แรงบิด 15 กิโลกรัมเซนติเมตร ที่แรงดัน 6 โวลต์
- แรงบิด 17 กิโลกรัมเซนติเมตร ที่แรงดัน 7.2 โวลต์
- ทำงานที่แรงดัน 4.8V ถึง 8.4V
- ค่า Dead Zone เพียง 3 ไมโครวินาที







อุปกรณ์ที่มีในชุด
เซอร์โวมอเตอร์ x 1 ,แขนเซอร์โวใหญ่ x 1 , แขนเซอร์โวเล็ก x 1, ข้อต่อเซอร์โวมอเตอร์ด้านหมุนอิสระ x 1, ข้อต่อเซอร์โวมอเตอร์ด้านเฟือง x 1 ,สกรู 3×4 มม. x 8, สกรูเกลียวปล่อย 2 มม. x 7
เมื่อประกอบเสร็จสมบูรณ์ จะมีลักษณะดังนี้

การใช้งานกับ POP X2 ,IPST-SE และ ATX2
สำหรับการใช้งานกับบอร์ดควบคุมรุ่นต่างๆ ของ inex ก็ยังเขียนโปรแกรมเหมือนเดิม ด้วยคำสั่ง servo();
ตัวอย่าง การใช้งานกับบอร์ด ipst-se
#include <ipst.h> // IPST-SE Board
void setup() {
setTextSize(2);
}
void loop() {
servo(0,knob(180));
glcd(0,0,"%d ",knob(180));
}
สำหรับ ATX2 และ POP-X2 ก็เขียนโปรแกรมทดสอบได้ในลักษณะเดียวกัน
Facebook Comments Box