
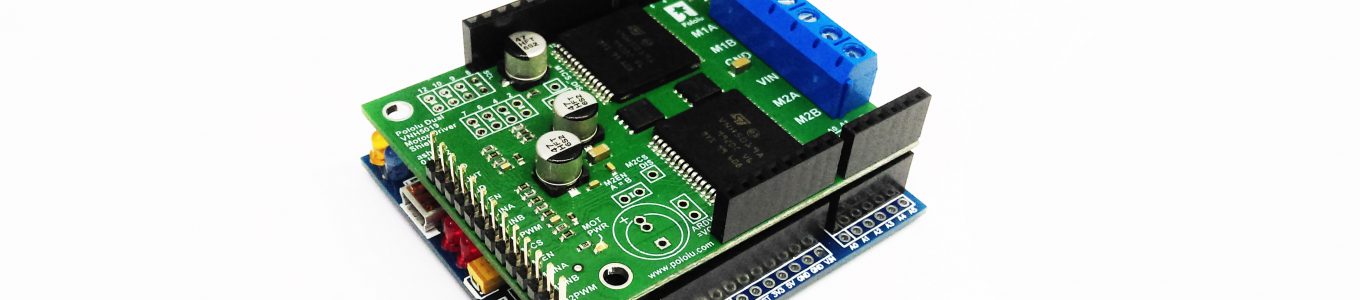
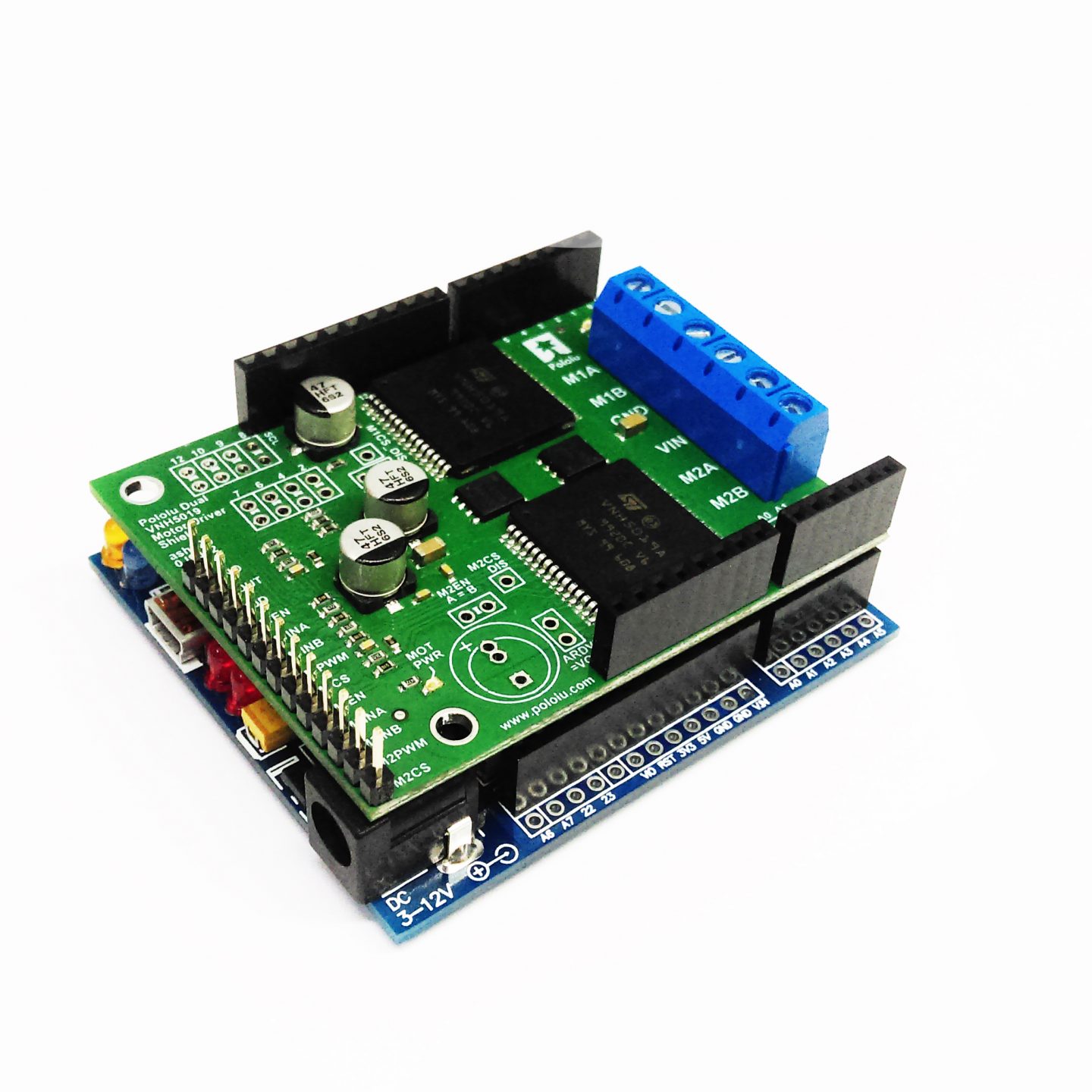
Dual VNH5019 Motor Driver Shield for Arduino
บอร์ดขับมอเตอร์ Dual VNH5019 รองรับการใช้งานกับบอร์ด Arduino ง่ายต่อการควบคุม DC มอเตอร์ 2 ตัวสามารถขับมอเตอร์ที่มีกำลังสูงได้ Dual VNH5019 ทำงาน 5.5-24 V และสามารถรับกระแสไฟอย่างต่อเนื่องถึง 12 A (สูงสุด 30 A) ต่อมอเตอร์หรือต่อเนื่องตลอด 24 A (สูงสุด 60 A) ไปยังมอเตอร์เดียวที่เชื่อมต่อกับทั้งสองช่อง บอร์ดขับมอเตอร์ทำการขับความไวของมอเตอร์ด้วยขาความถี่ PWM ขับทิศทางของมอเตอร์ด้วยขา INA INB และ Dual VNH5019 ยังมีขาที่สามารถใช้กับบอร์ดอื่น ๆ ได้เช่นกัน แต่ขาที่ต่อวงจรจะอยู่ทางด้านข้างของบอร์ด

คุณสมบัติทั่วไป
– สามารถขับมอเตอร์ที่มีแรงดัน 5.5-24V
– ขับมอเตอร์กระแสไฟได้ถึง 12A (สูงสุด 30A) ต่อมอเตอร์
– เอาต์พุตมอเตอร์สามารถใช้งานรวมกันได้ถึง 24A (สูงสุด 60 A)
– ขาสัญญาณต่ำสุด 3V และสูงสุด 5V
– ความถี่ของขาสัญญาณ PWM สูงสุดได้ถึง 20 kHz
– มี LED แสดงทิศทางการทำงานของมอเตอร์
– สามารถใช้งานร่วมกับบอร์ด Arduino หรือ บอร์ดไมโครคอลโทรลเลอร์อื่น ๆ ได้ ขาพอร์ตต่อเข้ากับบอร์ดอื่นจะอยู่ทางด้านซ้ายของบอร์ด Dual VNH5019
– เมื่อใช้ Dual VNH5019 สามารถนำแรงดันจาก Arduino มาใช้ขับมอเตอร์ได้
– ขาของ Dual VNH5019 เมื่อบัดกรีเล้วสามารถนำไปเสียบกับ Arduino ได้เลย
– มี Library ของ Dual VNH5019 ที่สามารถใช้งานกับ Arduino ได้เลย
– ป้องกันแรงดันไฟฟ้าไหลย้อนกลับได้สูดสุด 16V
คุณสมบัติพิเศษ
– สามารถรับกระแสแรงดันได้สูงสุดถึง 41V ในเวลาสั้นๆ อย่าใช้เป็นเวลานาน
– เมื่อมีแรงดันไฟฟ้าเกิน หรือ ต่ำเกินไปบอร์ดก็จะทำการหยุดทำงานโดยอัตโนมัติ
– มีวงจรป้องกันการช็อตกันของแรงดันไฟฟ้า
อุปกรณ์ต่าง ๆ ที่มีมาในชุดสามารถนำไปบัดกรีแล้วใช้งานได้เลย การใช้งานเพียงแค่นำไปเสียบกับบอร์ด Arduino ก็ได้งานได้เลย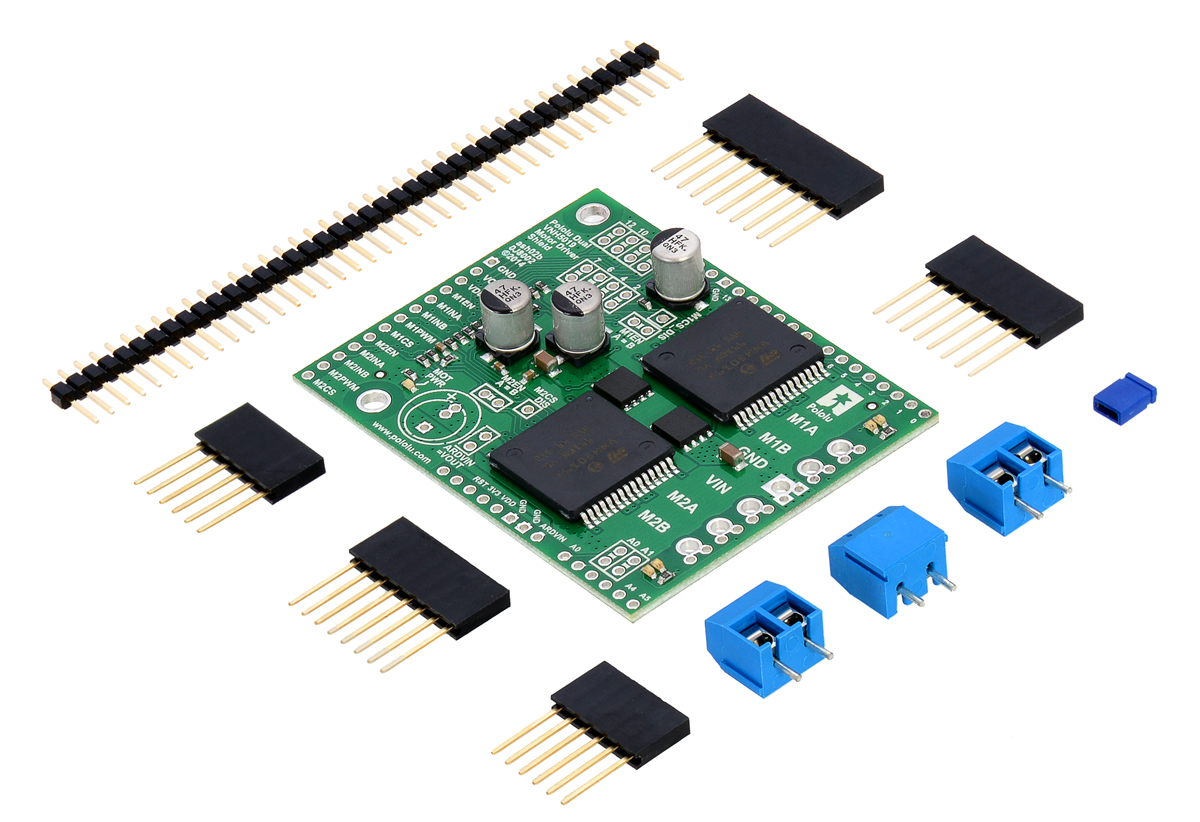


สำหรับตัวอย่างการใช้งานเราจะนำมาใช้งานกับบอร์ด Arduino R3B ของทาง inex ซึ่งเป็นบอร์ด Arduino ตัวใหม่ที่ inex ได้ผลิตขึ้นมา
บอร์ด i-Duino UNO R3B หรือบอร์ด R3B ที่ใช้ฮาร์ดแวร์ Arduino กับชิป ATmega328PB ใหม่ล่าสุด พร้อมคุณสมบัติที่แข็งแกร่งด้านภาคจ่ายไฟ ทำให้ใช้งานกับแบตเตอรี่ 3V ได้ ส่งเสริมให้เมกเกอร์นำไปทำอุปกรณ์ Wearable Electronics ได้ง่ายขึ้น พร้อมคุณสมบัติในการป้องกันการ copy code และรักษาข้อมูล EEPROM ซึ่งเป็นคุณสมบัติพิเศษที่ไม่มีใน UNO มาตรฐาน




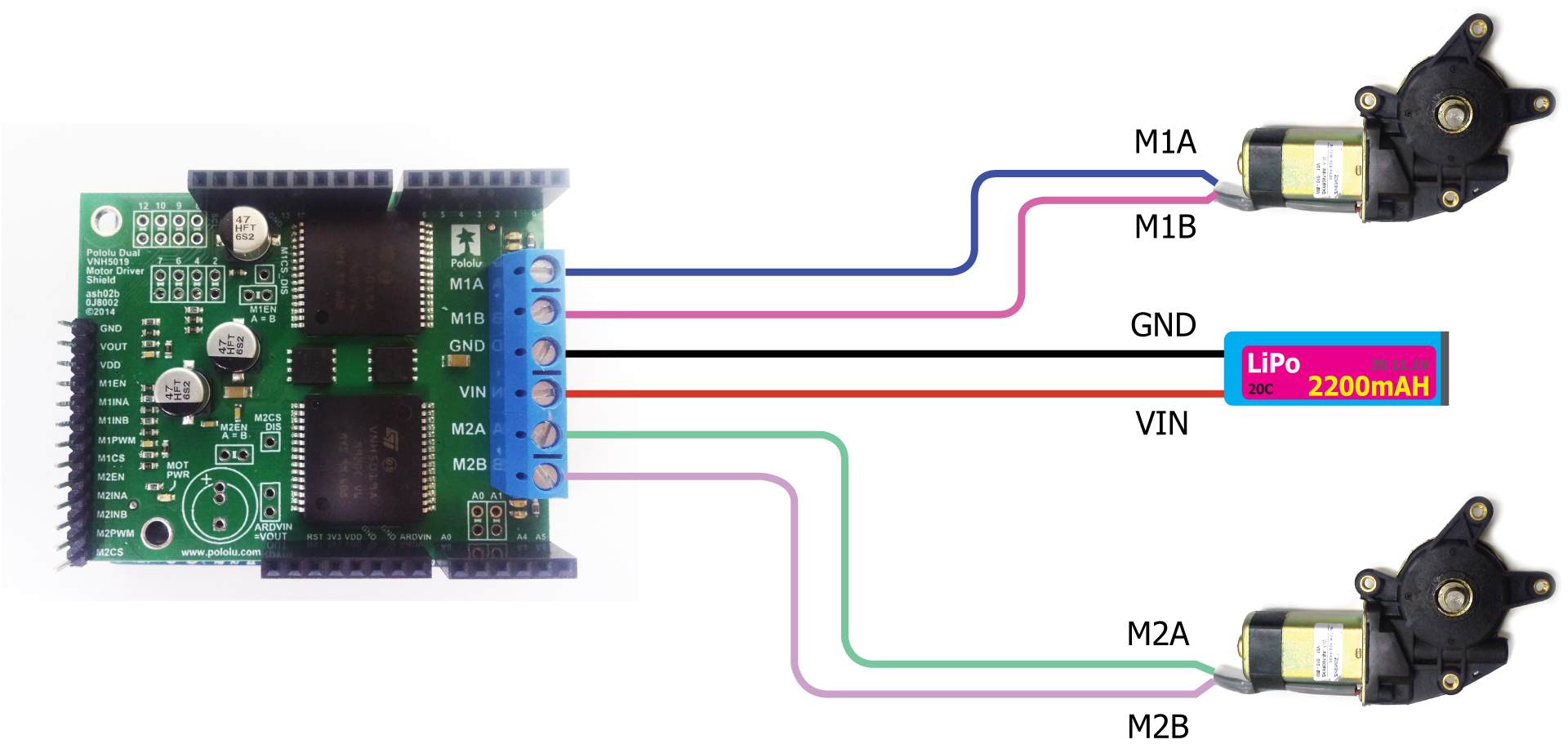
สำหรับการต่อวงจรมอเตอร์และแบตเตอรี่เลี้ยงมอเตอร์จะต่อตรงเทอรืมิเนอร์คอนเน็กเตอร์ มอเตอร์ 1 จะใช้ขา M1A กับ M1B มอเตอร์ 2 จะใช้ M2A กับ M2B ส่วนไฟเลี้ยงมอเตอร์เสียบตรงพอร์ต GND และ VIN
ตัวอย่างโค้ดในการทดสอบ
ในการใช้งาน Dual VNH5019 จะต้องโหลด Library ก่อน เพื่อให้งานต่อการใช้งาน เพราะในนั้นได้เขียนโปรแกรมเเละคำสั่งในการเรียกใช้ขาต่าง ๆ มาไว้ให้แล้ว
ลิงค์ดาวน์โหลด Library
วิธีการติดตั้ง Library
- เมื่อโหลด Library เสร็จเเล้วให้ทำการเเตกไฟล์ .zip ออก
- นำโฟลเดอร์ Dual-VNH5019 ไปวางไว้ใน C:\Arduino17\libraries
เมื่อนำ Library ไปติดตั้งเเล้วต่อไปก็มาเขียนโค้ดเพื่อให้มอเตอร์ทำงาน
#include "DualVNH5019MotorShield.h"
DualVNH5019MotorShield md;
void setup()
{
md.init();
}
void loop()
{
for (int i = 0; i <= 400; i++)
{
md.setSpeeds(i, i);
delay(2);
}
delay(3000);
for (int i = 400; i >= -400; i--)
{
md.setSpeeds(i, i);
delay(2);
}
delay(3000);
}
การทำงานของโปรแกรม
โปรแกรมจะทำงานโดยการหมุนความเร็วของมอเตอร์จากความเร็วน้อยไปมาก ทำการหมุนมอเตอร์พร้อมกันทั้ง 2 ตัว ความเร็วในการสั่งมอเตอร์ได้สูงสุด 400 เมื่อความเร็วถึง 400 จะทำการหมุนที่ความเร็วสูงสุดเป็นเวลา 3 วินาที หลังจากนั้นก็จะหมุนกลับอีกด้าน จากความเร็วน้อยไปมาก และหมุนที่ความเร็วสูงสุด 3 วินาที