

ZX-MOTOR2A บอร์ดขับมอเตอร์ไฟตรง

ZX-MOTOR2A บอร์ดขับมอเตอร์ไฟตรงขนาดเล็ก ต้องบอกก่อนเลยว่าถึงตัวมันจะเล็กแต่ประสิทธิภาพการทำงานของมันไม่เล็กตามตัว เเละยังสามารถขับมอเตอร์ TAMIYA ได้ดีอีกด้วย มอเตอร์ TAMIYA ทั่วไป ทาง inex จะไม่เเนะนำให้ใช้กับบอร์ด ATX-2, IPST-SE, POP-X2 โดยตรง เเต่ถ้าต้องการใช้งานจะต้องมีบอร์ด ZX-MOTOR2A เป็นตัวขับเท่านั้น
ZX-MOTOR2A เป็นบอร์ดขับมอเตอร์ตัวใหม่ที่ inex เปิดตัวในปีใหม่ 2017 ถือว่าเป็นฤกษ์งามยามดีมาก ๆ ในการเปิดตัว สาเหตุที่ทำบอร์ดขับมอเตอร์ตัวนี้ขึ้นมาก็เพราะว่า ได้ยินหลาย ๆ เสียงแอบบ่นว่าทำไมบอร์ด ATX-2, IPST-SE, POP-X2 ถึงขับมอเตอร์ TAMIYA ไม่ได้ ทางทีมงานวิศวกรของทาง inex จึงไม่นิ่งนอนใจ เราจึงหาชิปที่สามารถขับมอเตอร์ TAMIYA ได้ และในสุดก็เจอชิปตัวนั้น และได้ทำการพัฒนาเเละ รวมร่างมาเป็น ZX-MOTOR2A คำว่า 2A คือสามารถรับกระแสไฟฟ้าสูงสุดได้ถึง 2 แอมป์ (สามารถใช้แบต Lipo 7.4V ได้นั้นเอง)
บอร์ด ATX-2, IPST-SE, POP-X2 ชิปขับมอเตอร์บนบอร์ดจะไม่สามารถขับมอเตอร์ของ TAMIYA ได้เนื่องจากมอเตอร์ TAMIYA รับแรงดันสูงสุดได้แค่ 3V แต่ชิปขับมอเตอร์บนบอร์ด ATX-2, IPST-SE, POP-X2 ขับมอเตอร์ที่มีแรงดันได้ตั้งแต่ 6V ขึ้นไป ดังนั้นไม่ควรที่จะเอาไปขับมอเตอร์ TAMIYA โดยตรง เพราะจะทำให้เกิดความเสียหายทั้งมอเตอร์ และบอร์ดขับมอเตอร์ สาเหตุที่ทำให้เกิดความเสียหายเพราะ มอเตอร์ TAMIYA มีความต้านทานภายในที่ต่ำมาก ทำให้กระแสไฟวิ่งลง GND มากเกินไป จนเกินความสามารถของบอร์ดขับมอเตอร์ที่จะรับไหว ทำให้บอร์ดได้รับความเสียหายเเละพังไปในที่สุด
มาถึงตอนนี้เเล้วหลาย ๆ ท่านคงเข้าใจเเล้วว่าทำไม่ถึงไม่ควรเอาบอร์ด ATX-2, IPST-SE เเละ POP-X2 ไปขับมอเตอร์ TAMIYA ดังนั้นเราจึงจะมาเเนะนำการใช้งานบอร์ดขับมอเตอร์ ที่สามารถขับมอเตอร์ TAMIYA ได้ นั้นก็คือ ZX-MOTOR2A




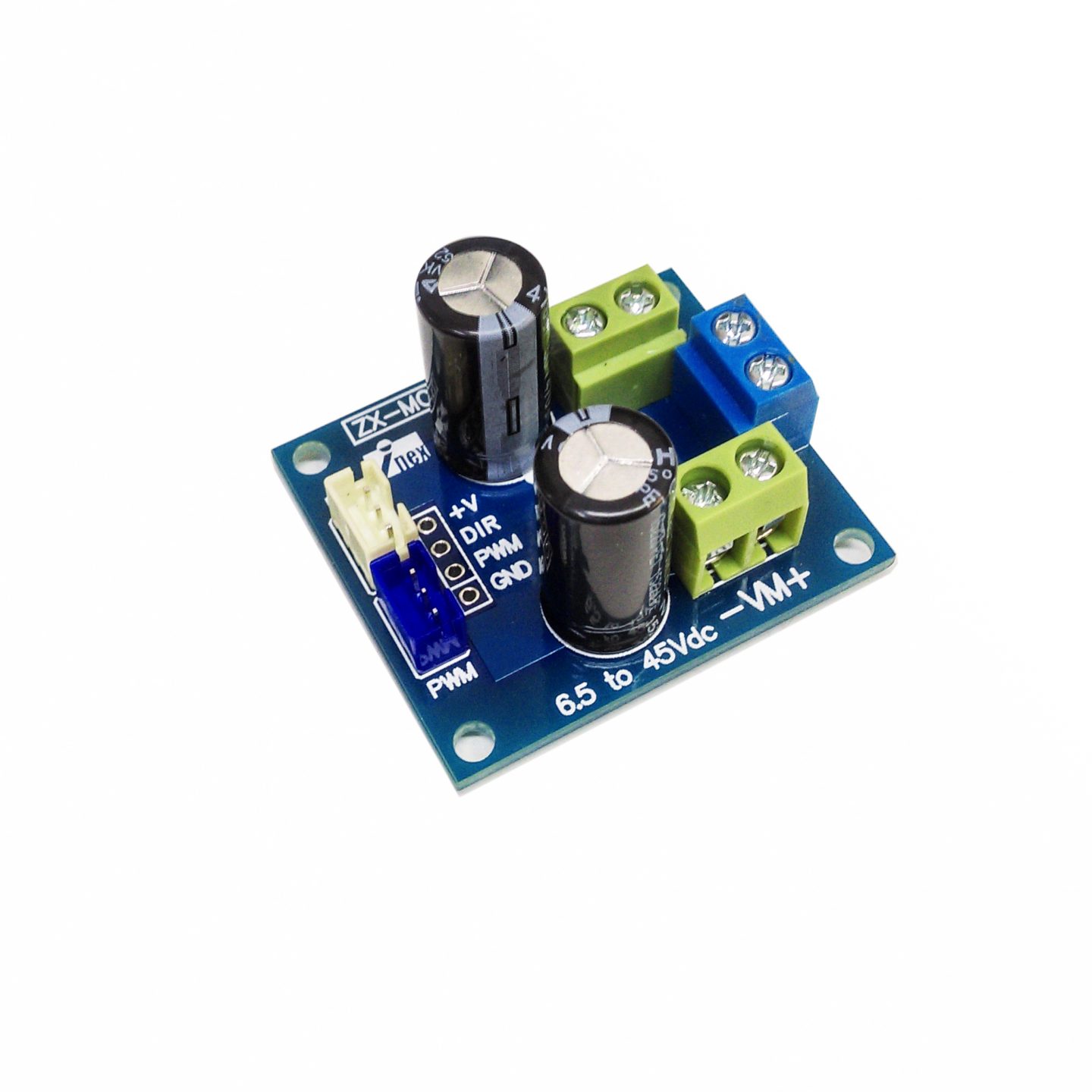
คุณสมบัติของ ZX-MOTOR2A
– ขับมอเตอร์ได้ตั้งแต่ 6.5V – 45V และสามารถขับมอเตอร์ของ TAMIYA ได้เช่นกัน
– กระแสไฟสูงสุด 2 A
– ขาพอร์ตอินพุตรับเรงดันได้สูงสุด 5.5V และต่ำสุด 3V
– ควบคุมด้วยสัญญาณ PWM
– มีวงจรป้องกันเเรงดันตก
– เมื่อมีเเรงดันไฟฟ้าน้อยจะทำการหยุดทำงาน
– มีวงจรป้องกันเเรงดันไฟฟ้าเกิน
– เมื่ออุณหภูมิของ IC มีความร้อนมากเกินไป บอร์ดจะทำการหยุดทำงานโดยอัตโนมัติ
ต้องบอกว่าว้าวเลยสำหรับคุณสมบัติของมัน สำหรับตัวอย่างการใช้งานนั้นเราจะเเนะนำใช้งานกับบอร์ด POP-X2 เเละ IPST-SE โดยในตัวอย่างจะเเสดงการเชื่อมต่อแบบ มอเตอร์ 1 ตัว เเละมอเตอร์ 2 ตัว
ในตัวอย่างจะเป็นการใช้งานในการขับมอเตอร์ TAMIYA เเต่ถ้าต้องการใช้งานกับมอเตอร์อื่น ๆ ก็สามารถเชื่อมต่อแบบเดียวกันได้ โดยการนำมอเตอร์ที่ต้องการใช้งาน เชื่อมต่อตามภาพตัวอย่างได้เลย
ตัวอย่างการเชื่อมต่อ POP-X2 กับ ZX-MOTOR2A
บนบอร์ดของ POP-X2 นั้นโดยทั่วไปจะสามารถขับมอเตอร์ได้เเค่ 2 ตัว ตรงคอนเน็กเตอร์สีเขียวที่เคยใช้งานกันมาตลอด เเต่บางท่านยังไม่รู้ว่ามันยังมีฟังก์ชั่นที่สามารถขับมอเตอร์เพิ่มได้อีก 2 ตัว สำหรับใช้บอร์ดขับมอเตอร์เเยกออกมา รวมเเล้วก็จะสามารถขับได้ 4 ตัว
ในตัวอย่างเราจะมาบอกวิธีการใช้งานพอร์ตที่สามารถขับมอเตอร์เพิ่มได้ จะเห็นพอร์ตเสียบคอนเน็กเตอร์สีน้ำเงินเเละสีขาว ข้างกับพอร์ตเสียบมอเตอร์ปกติ พอร์ตนั้นเลยที่เรากำลังพูดถึง โดยสามารถเชื่อมต่อบอร์ด POP-X2 เข้ากับบอร์ด ZX-MOTOR2A ตามรูปภาพด้านล่างได้เลย

การเชื่อมต่อวงจร
- นำหัวด้านหนึ่งของสาย JST มาเสียบเข้ากับบอร์ด POP-X2 ในพอร์ต M3E เเละ M3D
- จากนั้นนำหัวอีกด้าน เชื่อมต่อเข้ากับ ZX-MOTOR2A ในช่อง DIR เเละ PWM หรือสังเกตได้จาก สีของช่องเสียบคอนเน็กเตอร์ ให้เสียบให้ตรงกันทั้ง 2 สี ตามรูปภาพ
- นำเเบตเตอรี่มาต่อเข้ากับบอร์ด ZX-MOTOR2A ในช่อง -VM+ ขั่ว GND เสียบเข้ากับฝั่ง – เเละ ขั่ว VIN เสียบเข้ากับ ฝั่ง +
- เสียบมอเตอร์เข้ากับบอร์ด ZX-MOTOR2A ในคอนเน็กเตอร์ OUT
โปรแกรมตัวอย่างในการทดสอบ
คำสั่งที่สั่งให้มอเตอร์ทำงาน คือ motor(3,ความเร็ว); เป็นการสั่งให้มอเตอร์ตัวที่ 3 ทำงาน
#include<popx2.h>
void setup() {
}
void loop() {
int speed = knob(100);
motor(3,speed);
delay(3000);
motor(3,-speed);
delay(3000);
}
การทำงานของโปรแกรม
โปแกรมจะทำการสั่งงานมอเตอร์ให้หมุน ไป-กลับ เป็นเวลา 3 วินาที เเละทำการหมุน KNOB บนบอร์ด POP-X2 เพื่อทำการปรับความเร็วในการหมุนของมอเตอร์
ตัวอย่างการเชื่อมต่อ POP-X2 กับ ZX-MOTOR2A แบบมอเตอร์ 2 ตัว

การเชื่อมต่อวงจร
จะสังเกตุได้ว่าเมื่อนำ ZX-MOTOR2A 2 ตัวมาเชื่อมต่อกัน เเต่ต้องการใช้แหล่งจ่ายไฟที่เดียวกัน เพียงเเค่ใช้สายไฟมาเชื่อมต่อกันที่คอนเน็กเตอร์ -VM+ อีกฝั่งตามรูปภาพด้านบน เป็นการเชื่อมแหล่งจ่ายไฟระหว่าง 2 บอร์ด เเนะนำอย่าเสียบสลับขั่ว เเละ นำสาย JST มาเสียบที่ช่อง M4E เเละ M4D นำอีกด้านเสียบเข้ากับ DIR เเละ PWM ของ ZX-MOTOR2A
โปรแกรมตัวอย่างในการทดสอบ
คำสั่งที่สั่งให้มอเตอร์ทำงาน คือ motor(34,ความเร็ว); เป็นการสั่งให้มอเตอร์ตัวที่ 3 เเละ มอเตอร์ตัวที่ 4 ทำงานพร้อมกัน เเต่ถ้าต้องการให้เเค่มอเตอร์ตัวที่ 4 ทำงานเพียงตัวเดียว ให้ใช้คำสั่ง motor(4,ความเร็ว);
#include<popx2.h>
void setup() {
}
void loop() {
int speed = knob(100);
motor(34,speed);
delay(3000);
motor(34,-speed);
delay(3000);
}
การทำงานของโปรแกรม
โปรแกรมจะทำการสั่งงานมอเตอร์ให้หมุน ไป-กลับ เป็นเวลา 3 วินาที เเละทำการหมุน KNOB บนบอร์ด POP-X2 เพื่อทำการปรับความเร็วในการหมุนของมอเตอร์
การเชื่อมต่อบอร์ด IPST-SE กับ ZX-MOTOR2A
หลายคนอาจจะสงสัยว่า เอ๊ะ!! บอร์ด IPST-SE มันมีมอเตอร์เเค่ 2 ตัว จะขับมอเตอร์เเยกอีก 2 ตัวได้อย่างไร ? (รวมเเล้วเป็น 4 ตัว) บอร์ด IPST-SE ก็เหมือนกับบอร์ด POP-X2 ที่มีพอร์ตต่อมอเตอร์เเยก motor 3,4 โดยการเชื่อมต่อพอร์ตต่าง ๆ ดังนี้
Motor 3 :
Digital 19 = PWM
Digital 16 = DIR
Motor 4 :
Digital 20 = PWM
Digital 17 = DIR

โปรแกรมตัวอย่างสำหรับทดสอบการขับมอเตอร์
คำสั่งที่สั่งให้มอเตอร์ทำงาน คือ motor(34,ความเร็ว); เป็นการสั่งให้มอเตอร์ตัวที่ 3 เเละ มอเตอร์ตัวที่ 4 ทำงานพร้อมกัน เเต่ถ้าต้องการให้เเค่มอเตอร์ตัวที่ 4 ทำงานเพียงตัวเดียว ให้ใช้คำสั่ง motor(4,ความเร็ว); ในการใช้คำสั่ง motor 3,4 ของบอร์ด IPST-SE เเนะนำให้ใช้ Arduino version 1.7.11 หรือสูงกว่า จากทาง inex
#include<ipst.h>
void setup() {
}
void loop() {
int speed = knob(100);
motor(34,speed);
delay(3000);
motor(34,-speed);
delay(3000);
}
การทำงานของโปรแกรม
โปรแกรมจะทำการสั่งงานมอเตอร์ให้หมุน ไป-กลับ เป็นเวลา 3 วินาที เเละทำการหมุน KNOB บนบอร์ด IPST-SE เพื่อทำการปรับความเร็วในการหมุนของมอเตอร์
เป็นไงกับบ้างครับในการใช้งาน ZX-MOTOR2A ทีนี้ก็หมดปัญหาในการใช้บอร์ดของทาง inex ที่จะไปขับมอเตอร์ TAMIYA เเล้ว เเละการเพิ่มการขับมอเตอร์อีก 2 ตัวของ บอร์ด IPST-SE เเละ POP-X2 ทีนี้ก็สามารถขับมอเตอร์รวมกันได้เป็น 4 ตัว ทาง inex ก็จะมีสินค้าดี ๆ ออกมาเรื่อย ๆ สำหรับหุ่นยนต์ เเละชุดการเรียนรู้ต่าง ๆ อีกมากมาย ในการสั่งซื้อสินค้าก็สามารถเข้าไปที่เว็ปไซต์ www.inex.co.th หรือสามารถติดต่อฝ่ายขายได้โดยตรง 02-7477001-4