
![[POP-XT] Picking Robot EP.02 Picking Robot Building](https://doc.inex.co.th/wp-content/uploads/2013/09/Picking-Robot.jpg)
ตอนที่ 2 สร้างหุ่นยนต์ Picking Robot

จากโจทย์และสนามหุ่นยนต์ในตอนที่ 1 เพื่อให้บรรลุภารกิจเราจะต้องมีหุ่นยนต์มาทำหน้าที่นี้ พระเอกของเราคงไม่พ้น POP-BOT XT
เซนเซอร์ ZX-03
จากเดิม หุ่นยนต์ POP-BOT XT จะใช้เซนเซอร์แค่สองตัวในการเคลื่อนที่ตามเส้นทำให้ จะเดินได้ 4 เงื่อนไขคือ
- คร่อมเส้น
- ด้านซ้ายเจอเส้น สีดำ
- ด้านขวาเจอเส้นสีดำ
- เจอสีดำทั้งคู่ ซึ่งก็คือเส้นตัดทางแยก (เป็นสี่แยก)
แต่เมื่อเจอทางแยกที่ เป็น 3 แยก เซนเซอร์สองตัวไม่เพียงพอแล้ว จะต้องเพิ่มเซนเซอร์เข้าไปดังรูป

Gripper
ก็เป็นส่วนสำคัญสำหรับงานนี้ หุ่นยนต์ตัวนี้เลือกใช้ Gripper ของ Parallax ซึ่งใช้เซอร์โวมอเตอร์แค่ตัวเดียว ไม่ต้องดัดแปลงมากนัก โดยติดตั้งยึดเข้ากับแผ่นกริดที่ด้านหน้าของหุ่นยนต์

ส่วนตัวเซอร์โวก็ย้ายไปติดด้านหลังเพื่อรักษาสมดุลย์ของตัวหุ่นยนต์เอาไว้ สำหรับลวดที่ลิงก์ระหว่างเซอร์โวกับแขนจับ ถ้าในชุดที่มีให้ยาวไม่พอแนะนำว่า ให้เอาลวดที่ใช้ทำราวตากผ้ามาใช้ได้เลย ดัดงอ
ให้พอเหมาะ

ส่วนเพิ่มเติมอีกส่วนก็คือ จะต้องทำแขนค้ำระหว่างเซอร์โวและ Gripper เพื่อไม่ให้เวลาดึงเซอร์โว แล้วทั้งสองส่วนงอเข้าหากัน โดยใช้แท่งต่อและฉากโลหะเข้ามาช่วย

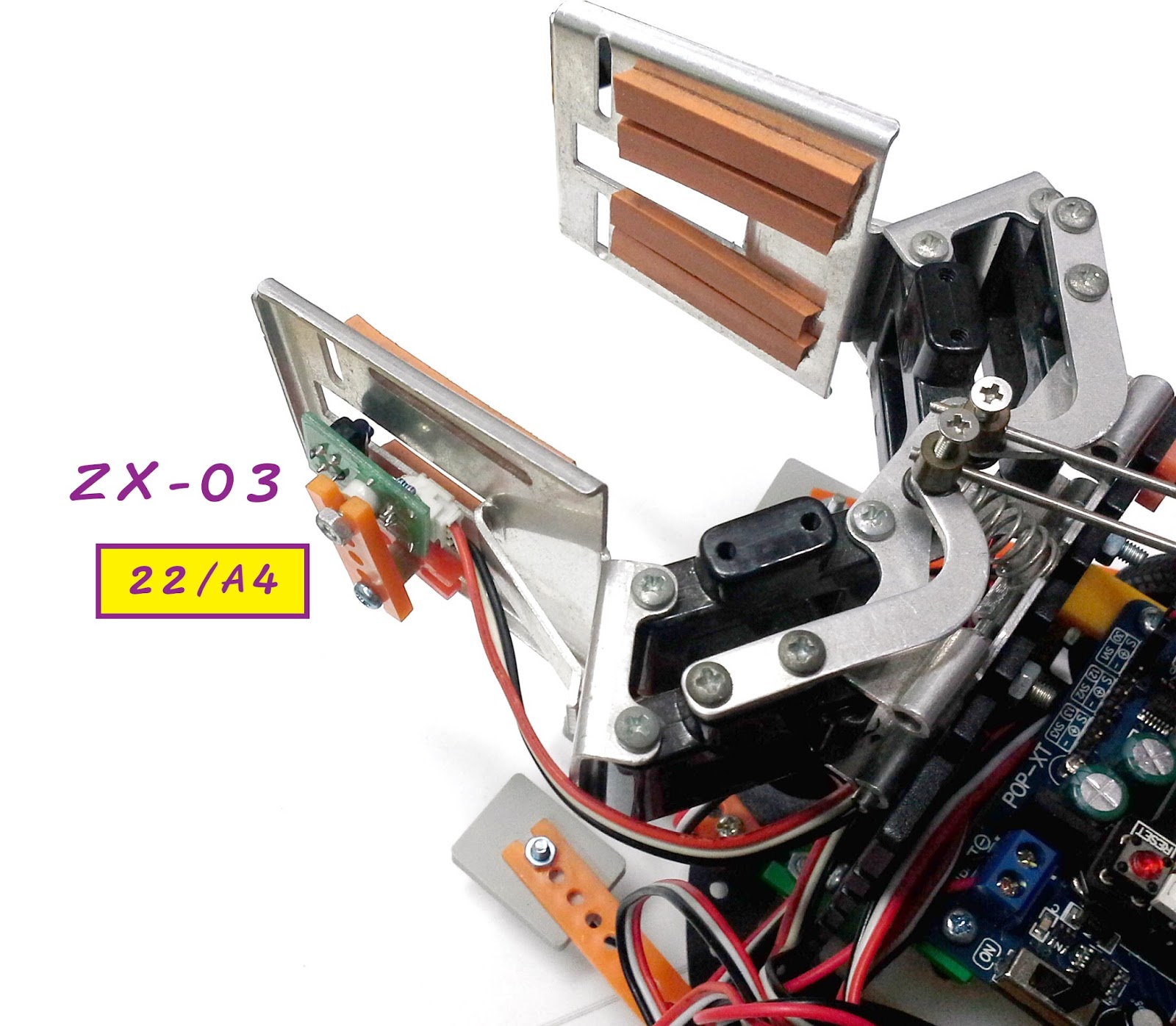
สำหรับการตรวจจับกระป๋อง ก็ต้องมีเซนเซอร์ ZX-03 อีก 1 ตัวมาทำหน้าที่นี้ โดยยึดเข้าที่ Gripper โดยตรงดังรูป
แบตเตอรี่

ปกติ POPBOT-XT จะใช้ถ่านอัลคาไลน์หรือถ่านชาร์จครับ แต่เมื่อต้องการให้หุ่นยนต์เคลื่อนที่แม่นยำ เป็นเวลนาน ๆ ถ่านที่เหมาะสมก็คือ Li-Po (ลิเธี่ยมโพลิเมอร์) หรือ Li-ion (ลิเธี่ยม ไอออน) ขนาด 2 เซลล์ 7.4V 1500 mA ติดตั้งไว้ด้านใต้ของ POP-XT ดังรูป

ที่เหลือก็เสียบสายมอเตอร์ เสียบสายเซอร์โว และสายเซนเซอร์ สุดท้ายเสียบสายแบตเตอรี่ และเตรียมพร้อมสำหรับการเขียนโปรแกรมในตอนต่อไปครับ