

หุ่นยนต์ micro:Maqueen Lite เป็นหุ่นยนต์อัตโนมัติขนาดเล็ก มาพร้อมตัวถังพลาสติกที่ครอบอยู่ภายนอก
มีสีให้เลือกถึง 4 สี (แดง,เขียว,ฟ้า และขาว ) ใช้บอร์ดควบคุมหลักเป็น micro:bit
เขียนโค้ดง่ายๆแบบลากบล็อกด้วย MakeCode , Scratch หรือใช้ภาษา Python หรือภาษา C/C++ ก็ไม่ยุ่งยาก
เหมาะอย่างยิ่งสำหรับผู้ที่เริ่มต้นเขียนโปรแกรมควบคุมหุ่นยนต์

ปอกเปลือกดูคุณสมบัติด้านใน
ถ้าให้ micro:Maqueen Lite
เป็นร่างกายของมนุษย์ อุปกรณ์ต่างๆ เหล่านี้ก็ทำให้ร่างกายของ micro:Maqueen Lite มีความสมบูรณ์พร้อม
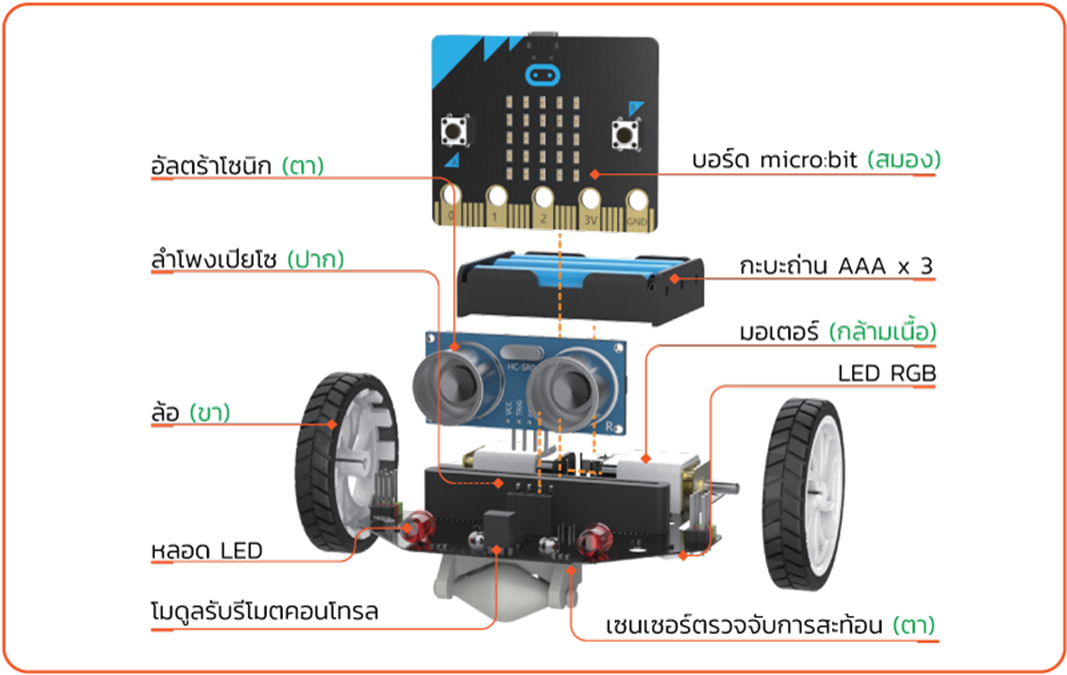
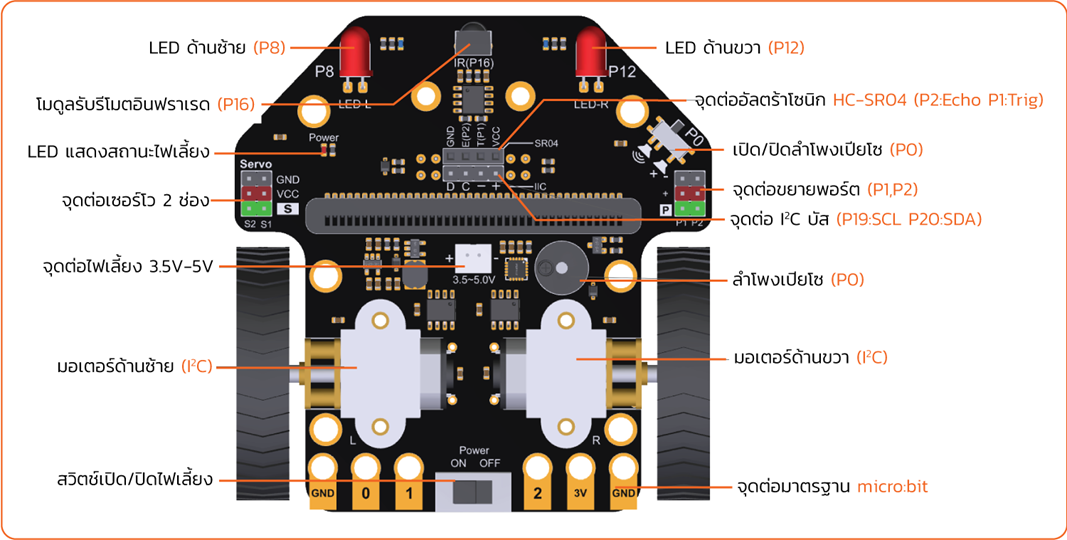
อุปกรณ์และจุดเชื่อมต่อด้านบน
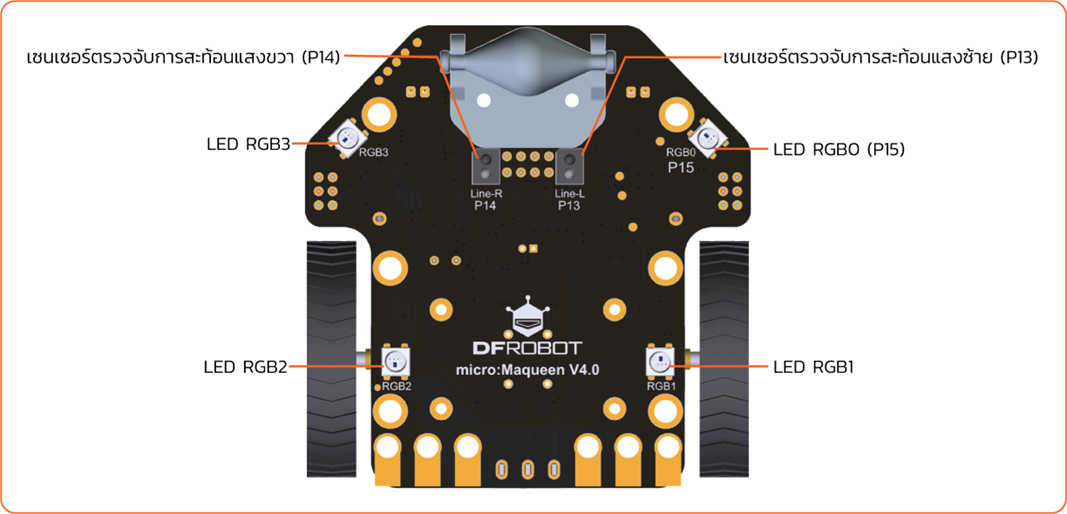
อุปกรณ์และจุดเชื่อมต่อด้านล่าง
คุณสมบัติของบอร์ด micro:Maqueen Lite
• ใช้แรงดัน 3.5V-5V (ถ่าน AAA 3 ก้อน หรือ แบตเตอรี่ ลิเธี่ยม 1 เซล 3.7V)
• เซนเซอร์ตรวจจับการสะท้อนแสงอินฟราเรด สำหรับเคลื่อนที่ตามเส้น (ให้ผลลัพธ์เป็นดิจิตอล ) ×2
• ลำโพงเปียโซ ×1
• โมดูลรับรีโมตคอนโทรล (รับรีโมตมาตรฐาน NEC ) ×1
• LED สีแดงติดตั้งบนบอร์ดซ้ายและขวา ×2
• LED แบบ RGB (NeoPixel ) ติดตั้งบนบอร์ด ×4
• อัลตร้าโซนิกเซนเซอร์ HC-SR04 (5V) ×1
• จุดเชื่อมต่อ I2C (3.3V) ×1
• จุดเชื่อมต่อเซอร์โวมอเตอร์ S1,S2 ×2
• จุดต่อพอร์ตขยาย P0,P1,P2 x3
• ชุดเฟืองขับมอเตอร์เฟืองโลหะ N20 อัตราทด 150:1 (133 รอบต่อนาที) ×2
• สามารถปรับความเร็วมอเตอร์ได้ด้วย PWM
• น้ำหนัก: 75.55 กรัม (ไม่รวมแบตเตอรี่,ตัวถังพลาสติกและ micro:bit)
• ตัวถังพลาสติกเป็นแบบ ABS น้ำหนัก 60 กรัม

ในชุดประกอบด้วย
หุ่นยนต์ micro:Maqueen Lite พร้อมติดตั้งตัวถังพลาสติก x 1
โมดูลอัลตร้าโซนิก HC-SR04 x 1
กระดาษลายสนามหุ่นยนต์ x 1
กระดาษแนะนำการใช้งานเบื้องต้น x1
หมายเหตุ
ในชุดไม่ได้ให้ถ่าน AAA 3 ก้อนมาด้วย
เริ่มต้นใช้งานด้วย Microsoft Makecode

1.นำบอร์ด micro:bit เสียบลงบนหุ่นยนต์ micro:Maqueen Lite
2.นำถ่าน AAA จำนวน 3 ก้อนใส่ให้กับหุ่นยนต์ micro:Maqueen Lite
3.ที่ Browser เข้าไปที่ https://makecode.microbit.org/ จากนั้นสร้าง Project ใหม่ขึ้นมา
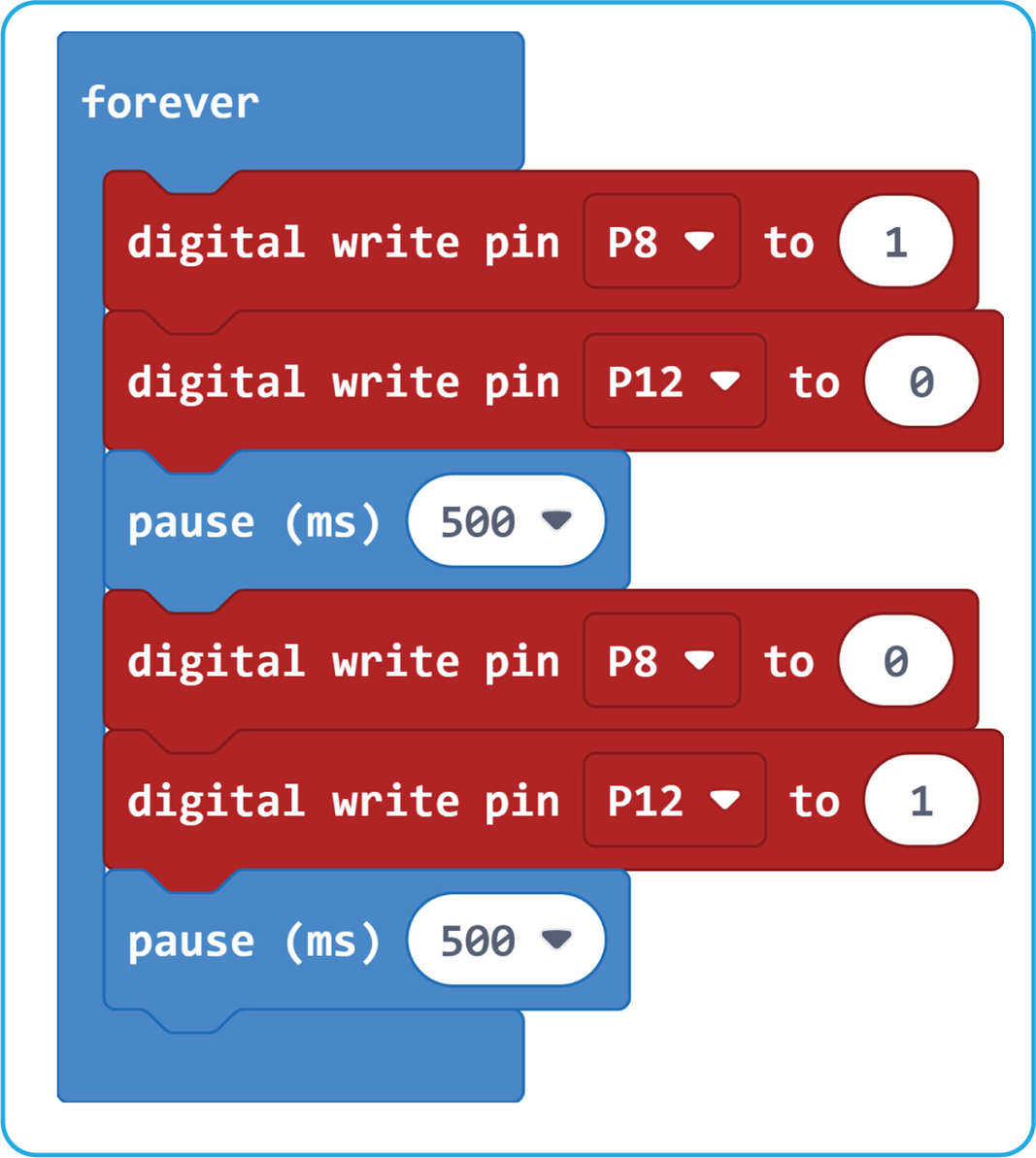
ตัวอย่างที่ 1 ทดสอบ LED ด้านหน้า

LED สีแดงด้านหน้าติดตั้งอยู่ที่ตำแหน่งขา P8 และ P12 สั่งให้ติดและดับสลับกันได้ตามตัวอย่าง ซึ่งตัวอย่างนี้สามารถเขียนได้ตรงๆ โดยไม่ต้องเพิ่ม Extension
https://makecode.microbit.org/_8A1REuFh87k3
ให้เขียนโค้ดตามตัวอย่าง ต่อสาย microUSB เข้ากับ micro:bit ที่โปรแกรม MakeCode ให้เลือกคำสั่ง Connect เพื่อเชื่อม micro:bit เข้ากับคอมพิวเตอร์และดาวน์โหลดโค้ด
การทำงาน
LED ด้านหน้าของ micro:Maqueen จะติดสลับไปมาระหว่างด้านซ้ายและขวา
เพิ่ม Extension สำหรับ micro:Maqueen Lite

-
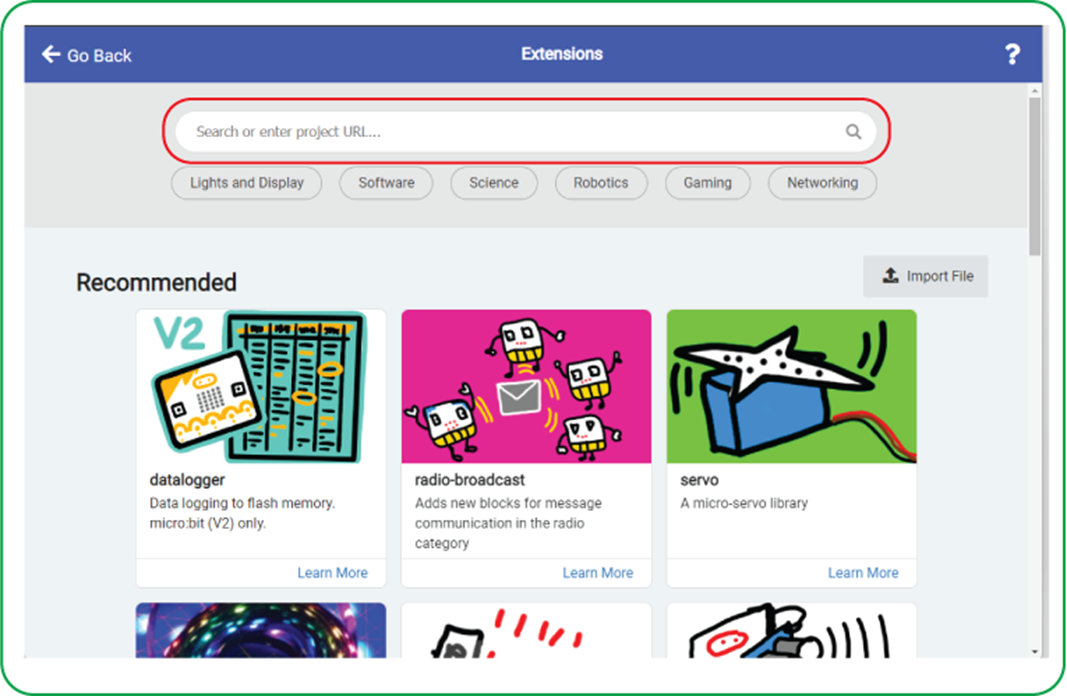
ที่แถบชุดคำสั่ง เลือกหัวข้อ Extension
-
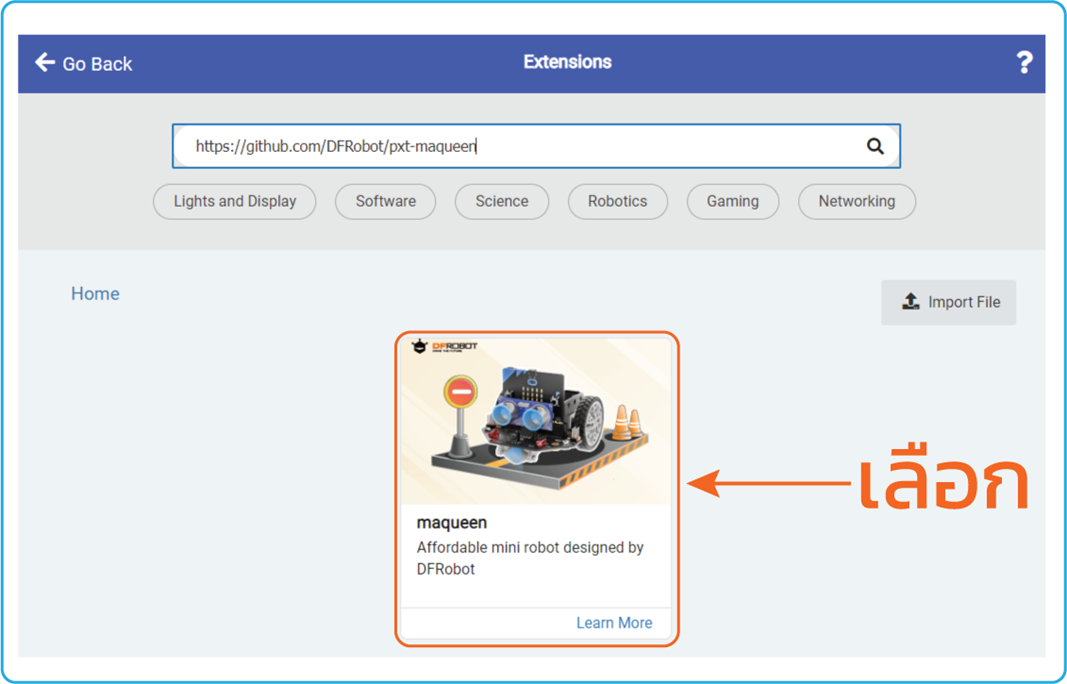
ที่หน้าต่าง Extension พิมพ์ https://github.com/DFRobot/pxt-maqueen ในช่องค้นหา
-
จะปรากฏ Extension ชื่อ maqueen ให้คลิกติดตั้งได้เลย
-
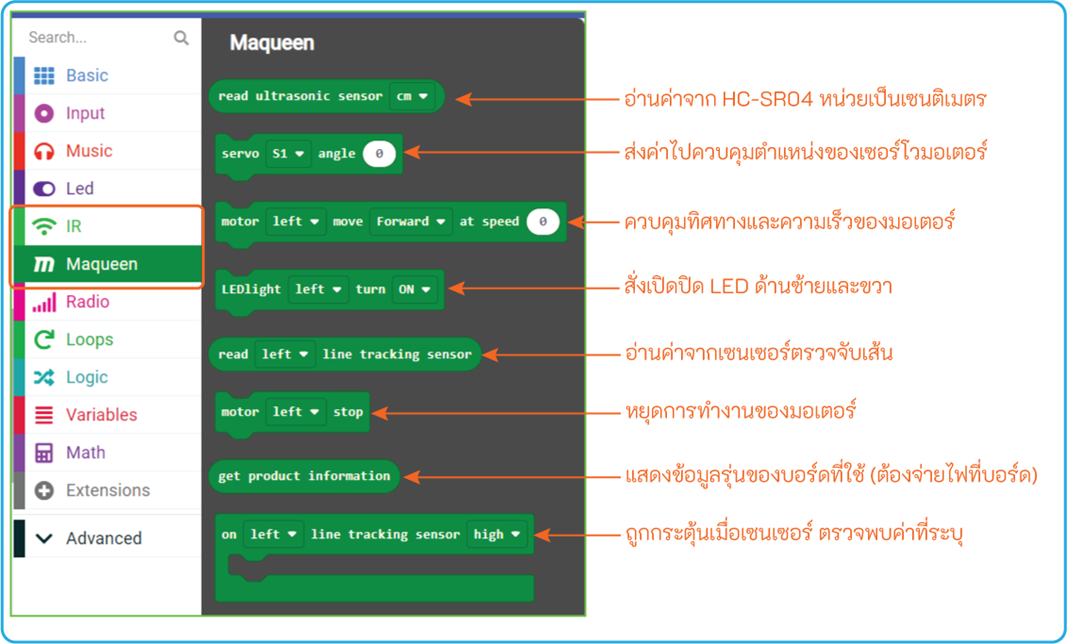
จะมีชุดคำสั่งในหัวข้อ IR (สำหรับรีโมตคอนโทรลอินฟราเรด) และ Maqueen ปรากฏขึ้นมา ซึ่งจะอธิบายการทำงานของบล็อกคำสั่งต่างๆ ดังรูป
ตัวอย่างที่ 2 ไฟกะพริบใช้ Extension Maqueen
จากตัวอย่างที่ 1 ใช้คำสั่งในหัวข้อ Pin สำหรับการให้ LED ด้านหน้าหุ่นยนต์ติดหรือดับ ตัวอย่างนี้จะใช้บล็อก LEDlight แทน โดยระบุได้ว่าจะเลือกหลอดด้านซ้ายหรือขวา และเลือกได้ว่าจะให้ติดหรือดับ

https://makecode.microbit.org/_MW1Wjd595DAU

LED RGB (Neopixel)

จากรูปด้านในจะเห็นว่า ด้ายล่างของหุ่นยนต์มี LED RGB ติดตั้งและต่อพ่วงกันอยู่ ถึง 4 ดวง โดยต่อตรงเข้ากับขา 15
ของ micro:bit ถ้าต้องการควบคุมจะต้องเพิ่ม Extension ที่ชื่อ Neopixel ขึ้นมา

-
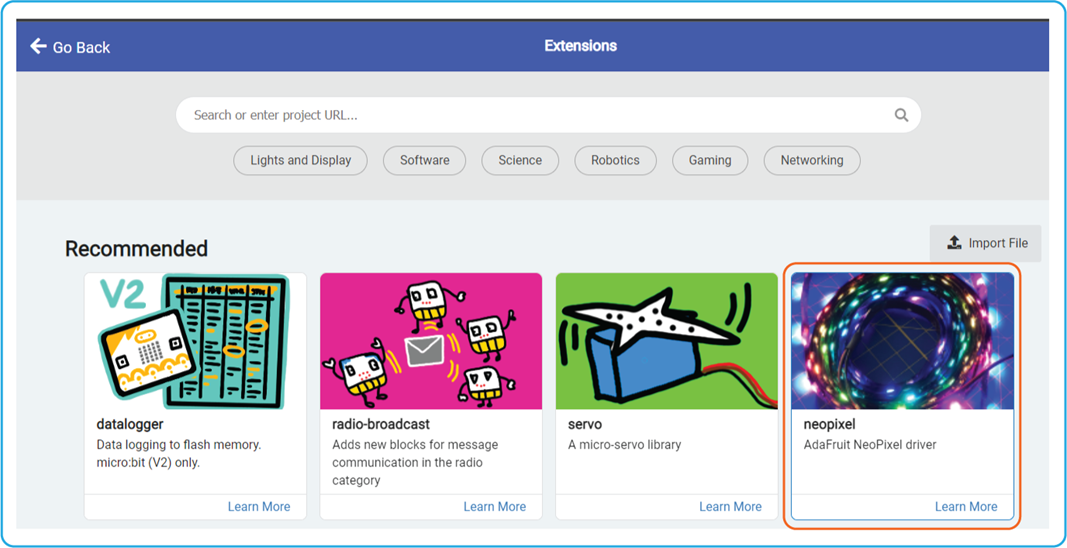
ที่ชุดคำสั่งเลือกหัวข้อ Extension
-
ที่หน้าต่าง Extension จะมี Extension ชื่อ neopixel กดเลือกเพื่อติดตั้งได้เลย
-
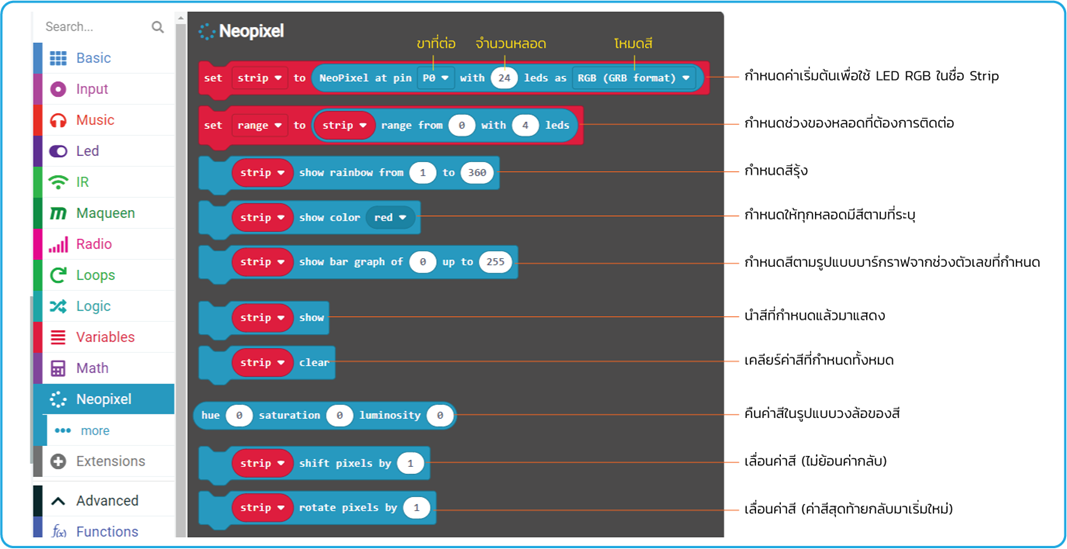
ชุดคำสั่งพื้นฐานของ Neopixel มีดังรูป
-
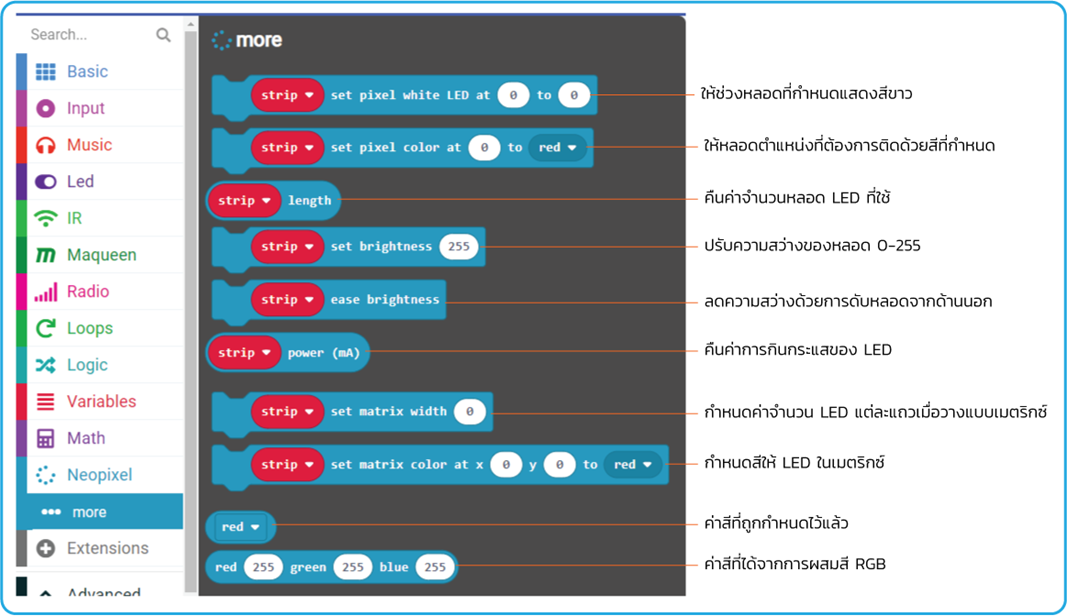
นอกจากชุดคำสั่งพื้นฐานแล้ว ถ้าคลิกที่ส่วน more จะพบคำสั่งเพิ่มเติม ดังรูป
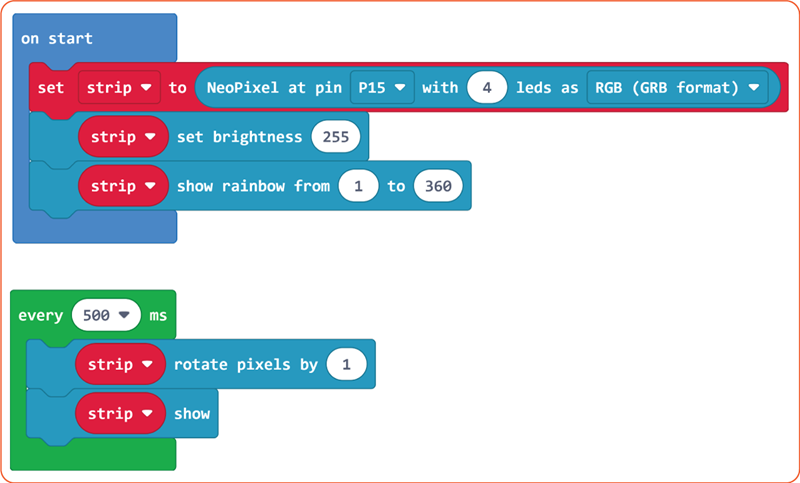
ตัวอย่างที่ 3 แสดงไฟหลากสีใต้ฐานหุ่นยนต์ กับ LED RGB
https://makecode.microbit.org/_aHAHtq1ixbyi
การทำงาน
LED RGB
ใช้ไฟเลี้ยงจากภายนอก ดังนั้นขณะทำงานจะต้องเปิดสวิตช์ที่หุ่นยนต์ micro:Maqueen เพื่อจ่ายไฟด้วย
เริ่มต้นกำหนดค่าให้กับ LED RGB ด้วยการระบุขาที่เชื่อมต่อเป็นขา 15 จำนวน LED ต่อพ่วงกัน 4 ดวง และรูปแบบภายในชิปเป็น GRB
กำหนดความสว่างของหลอดเป็น 255 เพื่อทุลุทะลวงตัวถังออกมา ส่งคำสั่งแสดงสีแบบสีรุ้ง ในฟังก์ชั่น every 500 ms ซึ่งจะเกิดเหตุการณ์ทุกๆ 0.5 วินาที ให้ทำการหมุนค่าสีและนำค่าสีที่เปลี่ยนแปลงมาแสดง
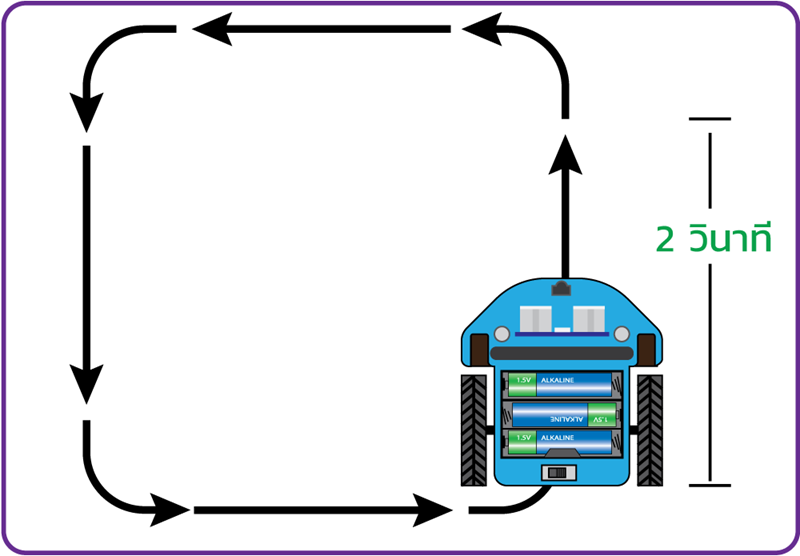
ตัวอย่างที่ 4 หุ่นยนต์เดินวนเป็นรูปสี่เหลี่ยม
เป็นธรรมเนียมแล้วสำหรับการขับเคลื่อนหุ่นยนต์ จะต้องควบคุมให้หุ่นยนต์เดินหน้าและให้หุ่นยนต์เลี้ยว ตัวอย่างที่ให้เห็นภาพมากที่สุดคือให้หุ่นยนต์เดินวนเป็นรูปสี่เหลี่ยม
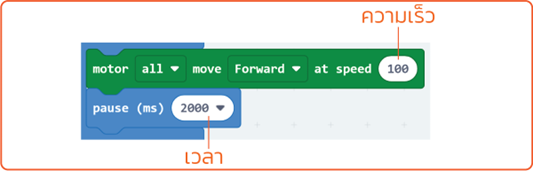
ระยะทางการเคลื่อนที่ของหุ่นยนต์จะมาจากความเร็วของหุ่นยนต์คูณกับเวลาที่ใช้ ความเร็วมาก หรือเวลามาก ก็ทำให้ได้ระยะทางมากขึ้นด้วย
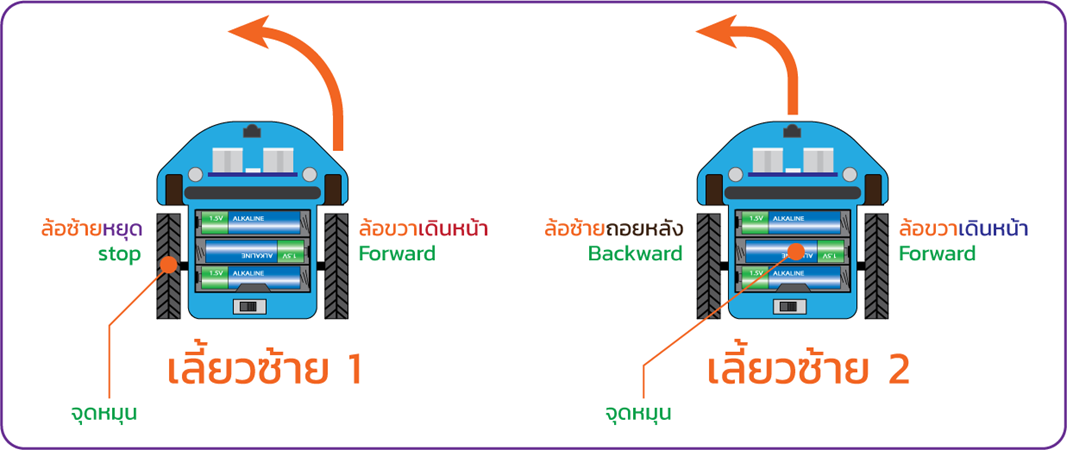
สำหรับการเลี้ยว เพื่อให้ได้ระยะที่เหมาะสมจะต้องกำหนดค่าความเร็วหรือเวลาให้เหมาะสมด้วย เช่นต้องใช้ความเร็วและเวลาเท่าใด จึงจะให้ค่าการเลี้ยวได้ 90 องศาพอดี
รูปแบบการเลี้ยว
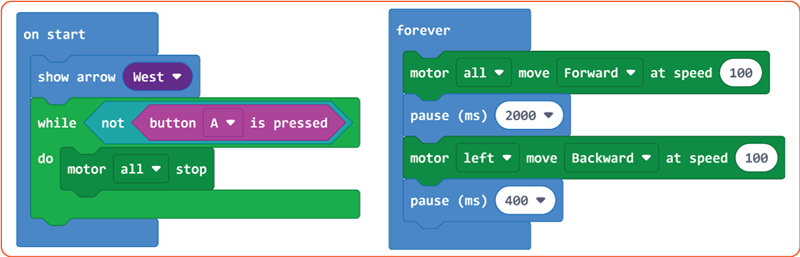
เมื่อสรุปแนวคิดเรียบร้อยแล้ว นำมาเขียนเป็นโค้ด
https://makecode.microbit.org/_5r6X9XAfkhJg
การทำงาน
เมื่อจ่ายไฟให้กับหุ่นยนต์ micro:Maqueen จะยังไม่ทำงานทันที เนื่องจากในช่วงแรกจะให้รอการกดสวิตช์ A ก่อน โดยถ้าไม่กดสวิตช์ ให้วนสั่งให้มอเตอร์หยุดไว้ก่อนเพื่อความปลอดภัย และแสดงสัญลักษณ์ลูกศรชี้ไปที่สวิตช์ A เพื่อให้รู้ว่าต้องกดเพื่อเริ่มทำงาน
ในลูป forever จะสั่งให้หุ่นยนต์ไปข้างหน้าด้วยค่าความเร็ว 100 (จากค่าสูงสุด 255) เป็นเวลา 2 วินาทีจากนั้นสั่งให้มอเตอร์เฉพาะด้านซ้ายถอยหลังในขณะที่มอเตอร์ด้านขวายังไปข้างหน้าอยู่ หุ่นยนต์จะเกิดการหมุนตัวทางซ้าย ค่าระยะเวลา 0.4 วินาที (400ms) เป็นค่าที่ทดสอบแล้วว่าเลี้ยวได้ 90 องศาพอดี (อาจปรับค่ามากหรือน้อยกว่าสำหรับหุ่นยนต์แต่ละตัว)
ดูความยาวของตอนนี้เกินกว่าคำว่าแนะนำตัวแล้ว สำหรับเนื้อหาเข้มข้นอื่นๆ
ทั้งเรื่องการควบคุมไร้สายด้วยชุดคำสั่ง Radio การเคลื่อนที่ตามเส้น การใช้งานอัลตร้าโซนิก ขอติดไว้เป็นตอนหน้านะครับ