
ในบทความนี้เราจะมาทำการขับมอเตอร์ด้วยบอร์ด MD-000 และจะใฃ้บอร์ดหุ่นยนต์ POP-X2 มาใช้ในการขับมอเตอร์ซึ่งบอร์ดตัวนี้ เป็นบอร์ดตัวใหม่ของบอร์ดตระกูล POP ที่ทาง inex จัดทำขึ้นมา บอร์ดตัวนี้ได้มีการเพิ่มฟังก์ชั่นพอร์ตการขับอุปกรณ์ภายนอกหรอขับมอเตอร์ภายนอกได้ด้วย ก่อนที่จะเริ่มต้นการใช้งานเรามารู้จักกับบอร์ดที่จะใช้งานกันก่อนดีกว่า
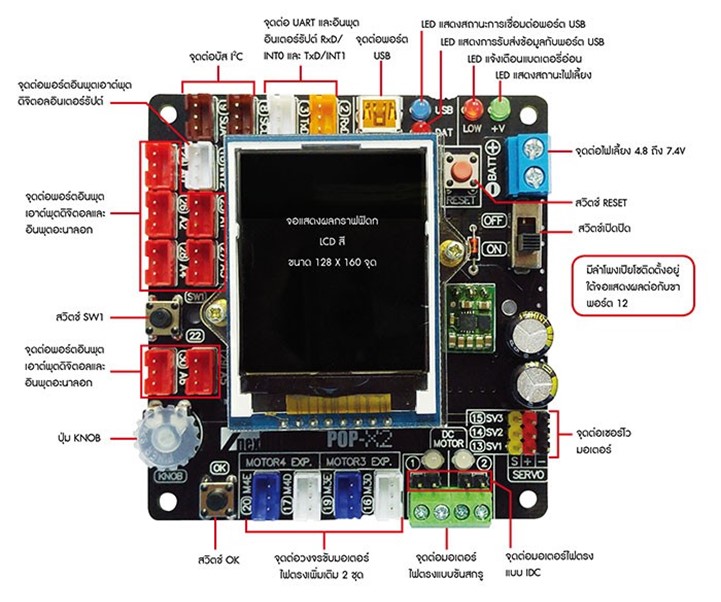
POP-X2 POP-X2 เป็นแผงวงจรควบคุมอัตโนมัติเขียนโปรแกรมควบคุมด้วยภาษา C/C++ มีวงจรเชื่อมต่อพอร์ต USB เพื่อใช้ในการสื่อสารข้อมูลและดาวน์โหลดโปรแกรมได้ในตัว พัฒนาจากฮาร์ดแวร์ระบบเปิดที่ชื่อ Arduino มีไลบรารีฟังก์ชั่นภาษา C/C++ สำหรับติดต่อกับฮาร์ดแวร์จำนวนมากไว้ให้ ทำให้เขียนโปรแกรมสั่งงานอุปกรณ์ต่างๆ ได้ง่าย
คุณสมบัติทางเทคนิค
– ใช้ไมโครคอนโทรลเลอร์ ATmega644P มีหน่วยความจำแฟลช 64 กิโลไบต์ โปรแกรมใหม่ได้ 10,000 ครั้ง
– มีหน่วยความจำข้อมูลอีอีพรอม 4 กิโลไบต์
– หน่วยความจำข้อมูลแรม 4 กิโลไบต์
– ทำงานที่สัญญาณนาฬิกา 20MHz
– จุดต่อพอร์ตอินพุตเอาต์พุตแบบ JST 3 ขา 16 จุดสำหรับต่ออุปกรณ์ตรวจจับและอุปกรณ์ต่อพ่วง
– มี LED แสดงสถานะไฟเลี้ยง, แจ้งเตือนแบตเตอรี่อ่อน และสถานะการเชื่อมต่อพอร์ต USB
– มีสวิตช์ RESET
– มีจุดต่อพอร์ต USB สำหรับดาวน์โหลดโปรแกรมและสื่อสารข้อมูลกับคอมพิวเตอร์
– มีจุดต่อไฟเลี้ยงผ่านทางจุดต่อสายแบบขันสกรู รับไฟเลี้ยง 3.7 ถึง 8.4V ใช้กับแบตเตอรี่ลิเธียมโพลีเมอร์ 1 หรือ 2 เซล โดยมีสวิตช์เปิด-ปิดเพื่อตัดต่อไฟเลี้ยงแก่แผงวงจร
– วงจรเตือนแบตเตอรี่อ่อนด้วยไฟกะพริบสีแดงที่แรงดัน +7V
– มีวงจรควบคุมไฟเลี้ยง +5V แบบสวิตชิ่ง
– จุดต่อพอร์ตอินพุตเอาต์พุตดิจิตอลหรืออะนาลอก 7 ช่อง คือ A0 ถึง A6 (ตรงกับขา 24 ถึง 30)
– จุดต่อพอร์ตดิจิตอลรองรับระบบบัส I2C 1 ชุด คือ จุดต่อ 9 (SDA) และ 8 (SCL)
– มีจุดต่อพอร์ตสื่อสารข้อมูลอนุกรม UART 1 ชุดคือ จุดต่อ 2 (RxD) และ 3 (TxD)
– มีจุดต่ออินพุตอินเตอร์รัปต์ 3 ช่องคือ จุดต่อ 2 (RxD/INT0), 3 (TxD/INT1) และ 18 (INT2)
– มีวงจรขับมอเตอร์ไฟตรง 2 ช่อง พร้อมไฟแสดงผล
– มีจุดต่อขาพอร์ตของไมโครคอนโทรลเลอร์สำหรับต่อขยายวงจรขับมอเตอร์ภายนอก 2 ช่อง คือ จุดต่อ 16 กับ 19 สำหรับ MOTOR3 EXP. และ 17 กับ 20 สำหรับ MOTOR4 EXP.
– มีจุดต่อขาพอร์ตของไมโครคอนโทรลเลอร์สำหรับขับเซอร์โวมอเตอร์ 3 ช่องคือ จุดต่อ 13, 14 และ 15 (เรียงตามลำดับ SV1, SV2 และ SV3)
– มีลำโพงเปียโซสำหรับขับเสียง โดยต่อกับขาพอร์ต 11
– มีจอแสดงผลแบบกราฟิกสี ความละเอียด 128 x 160 จุด แสดงภาพกราฟิกลายเส้น และพื้นสี (ไม่รองรับไฟล์รูปภาพใดๆ) พร้อมไฟส่องหลัง แสดงผลเป็นตัวอักษรขนาดปกติ (5×7 จุด) ได้ 21 ตัวอักษร 16 บรรทัด (21×16)
– มีสวิตช์กดติดปล่อยดับพร้อมใช้งาน 2 จุด
1. สวิตช์ OK ต่อร่วมกับตัวต้านทานปรับค่าได้ (KNOB) ซึ่งเชื่อมต่อไปยังขาพอร์ต A7 ทำให้อ่านค่าสัญญาณดิจิตอลและอะนาลอกได้ในขาพอร์ตเดียวกัน
2. สวิตช์ SW1 ต่อกับขาพอร์ต 22 พร้อมมีตัวต้านทานต่อพูลอัป
MD-000 บอร์ดขับมอเตอร์กระแสตรง
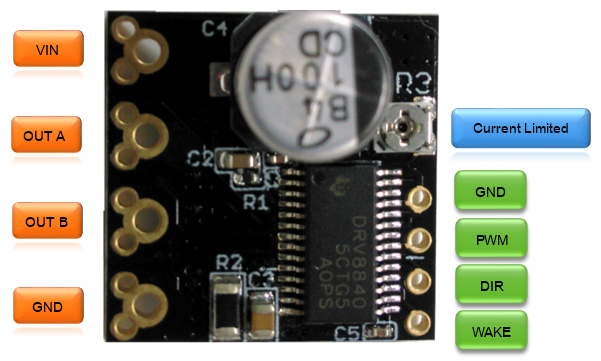
บอร์ดขับมอเตอร์กระแสตรง MD-000 เป็นบอร์ดไอซีเดี่ยว ที่ใช้ไอซี DRV8840 ของ Texas Instrument ซึ่งมีประสิทธิภาพสูงและมีขนาดเล็ก สามารถใช้แรงดันไฟกระแสตรงได้สูงสุดถึง 45 โวลต์ และขับมอเตอร์ได้ 3.5แอมแปร์ (สูงสุด 5 แอมแปร์ ชั่วขณะ) บนบอร์ดสามารถปรับกระแสสูงสุดที่จะจ่ายให้มอเตอร์ได้ เพื่อให้บอร์ดขับมอเตอร์ใฃ้งานได้ง่ายขึ้น ตัวเลือกบางอย่างของไอซีได้ถูกตั้งค่าไว้ เช่น Decay Mode ถูกตั้งให้เป็น Fast decayซึ่งจะทำให้มอเตอร์หมุนอิสระขณะไม่จ่ายไฟ นอกจากนี้ บอร์ดขับมอเตอร์รุ่นนี้รองรับการขับแบบ Sign-Magnitude และ Locked Anti-phase ซึ่งรับสัญญาณ PWM ได้ถึง 100 kHz
คุณสมบัติ
– รับแรงดันไฟกระแสตรง ตั้งแต่ 8.2 โวลต์ ถึง 45 โวลต์
– ขับกระแสมอเตอร์ได้สูงสุด 3.5 แอมแปร์ (สูงสุด 5 แอมแปร์ ชั่วขณะ)
– สามารถปรับกระแสสูงสุดที่จ่ายให้มอเตอร์ได้ ซึ่งตัดไฟที่ความถี่ 50 kHz
– รับสัญญาณ PWM ได้สูงสุด 100 kHz (ทั้งขา DIR และ PWM)
– ใช้งานได้ทั้งการขับแบบ Sign-Magnitude และ Locked Anti-phase
– ใช้ได้ทั้งระบบ 3.3 โวลต์ และ 5 โวลต์
– ระบบตัดไฟเมื่ออุณหภูมิเกิน
– ระบบป้องกันการลัดกระแสขาออก
|
PIN |
การใช้งาน |
|
VIN |
อินพุต ไฟกระแสตรง +8.2 ถึง +45 โวลต์ |
|
OUT A |
เอาท์พุตไปยังขั้วหนึ่งของมอเตอร์ |
|
OUT B |
เอาท์พุตไปยังอีกขั้วของมอเตอร์ |
|
GND |
ขากราวด์ |
|
Current Limited |
ตัวต้านทานหมุนปรับค่าได้ เพื่อควบคุมกระแสสูงสุดที่จ่ายให้มอเตอร์ โดย กระแสสูงสุด = 0.0007143 x ความต้านทานถึงกราวด์ |
|
PWM |
อินพุต ควบคุมการจ่ายไฟให้มอเตอร์ (เปิดปิด) |
|
DIR |
อินพุต ควบคุมทิศทางการจ่ายไฟให้มอเตอร์ |
|
WAKE |
อินพุต สถานะ HIGH เพื่อให้บอร์ดทำงาน สถานะ LOW เมื่อไม่ใช้งานบอร์ด (จะกินไฟต่ำ) |
***คำเตือน เมื่อใช้งานบอร์ดขับมอเตอร์ติดต่อกันเป็นเวลานาน ความร้อนจะกระจายไปทั่วทั้งแผงวงจร ซึ่งควรระมัดระวังในการใช้งาน และไม่ควรจับขณะทำงาน***
สำหรับการต่อวงจรเเละการเขียนโปรแกรมสามารถติดตามได้ที่ EP.2 การเชื่อมต่อวงจร