
ตอนที่ 2 การเคลื่อนที่ในเขาวงกต

จากตอนที่ 1 การอ่าน Barcode มาสู่ตอนที่ 2 การเคลื่อนที่ในเขาวงกตโดยไม่มีเส้นกำกับ จะต้องมีอุปกรณ์อื่นๆ เข้ามาช่วย โดยในงานนี้ให้ใช้ โมดูลเข็มทิศ HMC5983
โมดูลเข็มทิศ HMC5983

โมดูลเข็มทิศดิจิตอล HMC5983 เป็นตัวตรวจจับสนามแม่เหล็กโลก จึงนำมาประยุกต์เป็นตัวตรวจจับทิศทางเพื่อช่วยกำหนดทิศทางการเคลื่อนที่ของหุ่นยนต์ได้ เหมาะกับพื้นที่สนามที่ไม่มีเส้นกำกับ

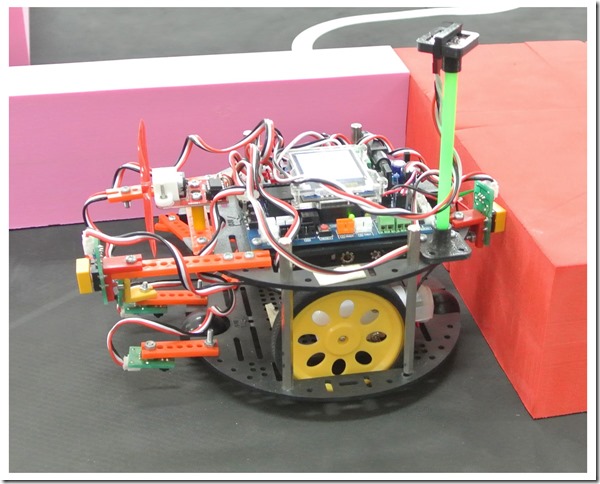
การติดตั้งโมดูล
จากรูปโครงสร้างทั้งหมดเป็นพลาสติก ไม่เกิดการรบกวนทำงานของเข็มทิศ และต้องติดตั้งให้สูงเหนือตัวหุ่นยนต์ขึ้นไป

การเชื่อมต่อ
โมดูลเข็มทิศ HMC5983 มีการสื่อสารด้วยระบบบัส I2C ประกอบด้วยขา SDA (ข้อรับส่งข้อมูล) SCL (ขาสัญญาณนาฬิกา) ซึ่งขาทั้งสองมีติดตั้งอยู่ที่บอร์ด IPST-SE เรียบร้อยแล้ว

ชุดคำสั่งสำหรับการติดต่อกับ HMC5983
เมื่อใช้งาน IPST-SE กับซอฟต์แวร์ Arduino เวอร์ชั่นล่าสุด จะสามารถใช้งานคำสั่งติดต่อกับเข็มทิศ HMC5983 ได้ทันที โดยมีคำสั่งที่ต้องใช้งานกับกิจกรรมนี้เพียงคำสั่งเดียวคือ
compass_read()
โดยฟังก์ชั่นนี้จะคืนค่า ทิศในช่วง 0-359 ออกมา
ตัวอย่างการอ่านค่าแสดงผลที่ glcd
setTextSize(2); glcdMode(1); glcd(2, 0, "%d ", compass_read());
การใช้งานเข็มทิศนั้น ก็เพื่อให้หุ่นยนต์เคลื่อนที่ตรงไปยังทิศทางที่ต้องการ และให้หุ่นยนต์หมุนตัวตรงไปยังทิศทางที่ต้องการ ดังนั้นก่อนการใช้งานโปรแกรม จำเป็นต้องสำรวจทิศ ของสนามก่อน โดยกำหนดเป็นตัวแปรขึ้นมาดังนี้
int N=50,E=122,S=168,W=300; โดยค่าเหล่านี้ ระบุทิศทั้ง 4 ที่เราเคลื่อนที่ โดยค่าจะไม่เป็นเชิงเส้นมากนัก และสำหรับค่าที่เกิดขึ้น อาจจะไม่เท่ากันทุกจุดในสนาม จะต้องมีการปรับจูน บวกลบค่าเพิ่มเติมจากค่าเหล่านี้ด้วย จากนั้น สร้างฟังกํชั่นเพื่อทำภารกิจต่างๆ

สำหรับฟังก์ชั่นที่เกี่ยวข้องกับการใช้งานเข็มทิศ ต้องยกเครดิตให้ ครูนัฎฐิกา หลอดแก้ว แห่งโรงเรียนบางปลาม้า “สูงสุมารผดุงวิทย์” ที่อนุเคราะห์รูปแบบการเขียนโค้ดที่ดูเข้าใจง่าย แต่ทำงานได้อย่างมีประสิทธิภาพ
ฟังก์ชั่นหมุนตัวไปจนกระทั่งถึงทิศที่ต้องการ
void rightUntil(int c) {
while (compass_read()<c){sr(40);}
}
void leftUntil(int c) {
while (compass_read()>c){sl(40);}
}
หลักการเขียนโปรแกรมง่ายๆ คือ ใช้ while ตรวจสอบเงื่อนไขการหมุนตัว โดยหมุนไปจนกระทั่งถึงทิศทางที่ต้องการ การหมุนจะต้องมีทั้งการหมุนทางซ้าย (leftUntil()) และหมุนทางขวา (rightUntil() ) เพื่อป้องกันการเคลื่อนที่ผ่านจุด 0 องศา ซึ่งจะทำให้การตรวจสอบทิศผิดพลาด
ตัวอย่าง
ปัจจุบันหุ่นยนต์อยู่ที่ตำแหน่ง 300 องศา(ทิศตะวันตก :W ) จะเคลื่อนที่ไปที่ตำแหน่ง 50 องศา (ทิศเหนือ : N) โดยปกติเราอาจจะเคลื่อนที่ทางขวา ช่วงเวลาสั้นๆ ได้ แต่ เพื่อไม่ให้ผ่านจุด 0 องศา เราจึงต้องใช้วิธีการเคลื่อนที่หมุนตัวทางซ้ายเพื่อไปที่ตำแหน่ง 50 องศาแทนโดยเขียนได้เป็น
leftUntil(50);
ฟังก์ชั่นเดินตรงไปตามทิศทางที่ต้องการ

สำหรับฟังก์ชั่นนี้ จะเดินตรงไปเรื่อย ๆจนกว่าจะชนกำแพงดังนั้นจะต้องติดตั้งสวิตช์ที่ด้านหน้าหุ่นยนต์ด้วยดังรูป โดยสวิตช์จะติดทั้งด้านหน้าและด้านหลัง เพื่อ ใช้ตรวจสอบทั้งการเดินหน้าและถอยหลัง
จากรูปสวิตช์ด้านหน้าต่อที่ขา 27 และสวิตช์ด้านหลังต่อที่ขา 30
void trackWallCompass(int c){ //แทร็กเข็มทิศ
while(in(27)){
if(compass_read()<=c+2&&compass_read()>=c-2){fd(40); }
else if (compass_read()<c+2){tr(40);}
else if (compass_read()>c-2){tl(40);}
}ao();
}
void trackWallBackCompass(int c) {
while (in(30)) {
if (compass_read()<=c+2&&compass_read()>=c-2){bk(40);}
else if (compass_read()<c+2){bk2(0,40);}
else if (compass_read()>c-2){bk2(40,0);}
}
ao();
}
การทำงานของโปรแกรมคือ ทำงานไปเรื่อยๆ จนเจอกำแพง โดยการอ่านค่าทิศทาง ถ้าค่าทิศทางอยู่ในช่วงผิดพลาดไม่เกิน +/- 2 องศาก็ให้หุ่นยนต์เดินตรงไป ถ้าเอียงไปด้านซ้ายก็ให้เลี้ยวซ้าย เอียงไปด้านขวาก็ให้เลี้ยวขวา
ฟังก์ชั่น เดินตรงด้วยเข็มทิศหยุดการเคลื่อนที่ด้วยเวลา
ฟังก์ชั่นนี้ใช้ในกรณีที่เดินตรงไป แล้วหยุดด้วยระยะทางที่กำหนด เนื่องจากเราไม่มี encoder ช่วยระบุเวลาที่กำหนดได้ จึงจำเป็นต้องใช้ ฟังก์ชั่น millis() ซึ่งเป็นค่าเวลาของระบบเข้ามาช่วย โดยฟังก์ชั่นนี้จะทำงานอยู่เบื้องหลังและให้ค่าเวลาส่งกลับมาให้เราตลอดเวลา ในหน่วยเป็นมิลลิวินาที ซึ่งนำค่านี้มาใช้จับเวลาการเคลื่อนที่ที่แม่นยำได้
void trackTimeCompass(int c,long t){ //แทร็กเข็มทิศด้วยเวลา
long m=millis();
while(millis()<(m+t)){
if(compass_read()<=c+2&&compass_read()>=c-2){fd(40); }
else if (compass_read()<c+2){tr(40);}
else if (compass_read()>c-2){tl(40);}
}ao();
}
void trackTimeBackCompass(int c,long t){ //แทร็กเข็มทิศ หยุดเมื่อหมดเวลา
long m=millis();
while(millis()<(m+t)){
if(compass_read()<=c+2&&compass_read()>=c-2){bk(40); }
else if (compass_read()<c+2){bk2(0,40);}
else if (compass_read()>c-2){bk2(40,0);}
}ao();
}
การทำงานของโปรแกรมจะเคลื่อนที่ตรงไปจนกว่าค่าเวลาจะมากกว่าค่าที่ตั้งไว้
จากฟังก์ชั่นทั้งหมดสามารถนำมาเขียนรูปแบบการเคลื่อนที่ในเขาวงกตได้ดังนี้
void MazeRight() {
trackWallCompass(N);
bk(30); delay(200); ao();
rightUntil(W);
trackWallCompass(W); // ใข่ใบที่ 1
bk(30); delay(200); ao();
leftUntil(N);
trackWallCompass(N);
bk(30); delay(200); ao();
rightUntil(E);
trackWallCompass(E); // ใข่ใบที่ 2
trackTimeBackCompass(E,2700);
leftUntil(N+12);
trackWallCompass(N+12); // ใข่ใบที่ 3
trackTimeBackCompass(N+12,900);
rightUntil(E);
trackTimeBackCompass(E,2300);
leftUntil(N+12);
trackWallCompass(N+12); // ใข่ใบที่ 4
trackWallBackCompass(N+12);
fd(40);delay(200);ao();
rightUntil(E);
trackWallBackCompass(E);
fd(40);delay(200);ao();
leftUntil(N);
trackWallBackCompass(N);
trackTimeCompass(N,1500);
rightUntil(E);
trackTimeCompass(E,2000);
rightUntil(S+15);
trackWallCompass(S+15);
bk(40); delay(250); ao();
rightUntil(W);
trackWallCompass(W); // ใขใบที่ 5
bk(40); delay(250); ao();
leftUntil(S+19);
trackTimeCompass(S+19,3000);
bk(40); delay(250); ao();
}
void MazeLeft() {
bk(30); delay(100);
trackWallCompass(N);
bk(30); delay(300); ao();
rightUntil(E);
trackWallCompass(E);
bk(30); delay(300); ao();
leftUntil(N);
trackWallCompass(N);
bk(30); delay(250); ao();
rightUntil(W);
trackWallCompass(W);
bk(30); delay(300); ao();
leftUntil(S);
trackWallCompass(S); // ใข่ใบที่ 1
trackWallBackCompass(S);
fd(30); delay(250); ao();
leftUntil(E);
trackTimeCompass(E, 1000);
leftUntil(N);
trackWallCompass(N);
bk(30); delay(150); ao();
rightUntil(W);
trackWallCompass(W);
bk(30); delay(100); ao();
leftUntil(N);
trackWallCompass(N); // ใข่ใบที่ 2
trackWallBackCompass(N);
fd(30); delay(250); ao();
rightUntil(E);
trackWallCompass(E);
bk(30); delay(100); ao();
leftUntil(N);
trackWallCompass(N);
bk(30); delay(150); ao();
rightUntil(E);
trackWallCompass(E); // ใข่ใบที่ 3
trackTimeBackCompass(E, 1000);
rightUntil(S);
trackWallCompass(S);
bk(30); delay(150); ao();
rightUntil(W);
trackWallCompass(W); // ใข่ใบที่ 4
bk(30); delay(1000); ao();
trackTimeBackCompass(W, 1000);
leftUntil(S);
trackWallCompass(S);
bk(30); delay(1000); ao(); // ใข่ใบที่ 5
leftUntil(E);
trackWallCompass(E);
bk(30); delay(100); ao();
rightUntil(S);
trackTimeCompass(S, 3000);
LLL(); ao();
}
