
iBlockly and Sumo-BOT ATX-2
จากบทความที่แล้วเราได้สอนวิธีติดตั้งและการใช้งานเบื้องต้นของ iBlockly หลาย ๆ ท่านคงจะได้เล่นไปบ้างแล้ว (สามารถดาวน์โหลด iBlockly ได้ที่ลิงค์นี้) มาถึงบทความนี้เราจะมาสร้างบล็อคที่ใช้งานกับหุ่นยนต์ Sumo-BOT ที่ทาง inex ได้จัดทำชุดหุ่นยนต์ซูโม่ขึ้นมา
หุ่นยนต์ซูโม่เป็นหุ่นยนต์ที่ต้องเขียนโปรแกรมเพื่อให้หุ่นยนต์ทำงานโดยอัตโนมัติ จะต้องเขียนโปรแกรมเพื่อไม่ให้ตกสนามและมีแรงปะทะกับคู่ต่อสู้ให้ได้มากที่สุด เพื่อเอาชนะคู่แข่งให้ได้
โดยในตัวอย่างนี้จะใช้โครงสร้างของหุ่นยนต์ซูโม่จากชุดของ inex ที่จัดจำหน่ายอยู่แล้วที่หน้าเว็ปไซต์ หุ่นยนต์ซูโม่เราใช้บอร์ด ATX-2 เป็นตัวควบคุมหลักและใช้มอตอร์ DC 4 ตัว ในการขับเคลื่อนหุ่นยนต์ มีเซ็นเซอร์ ZX-03 เพื่อตรวจจับเส้นขอบของสนามเพื่อไม่ให้หุ่นยนต์ตกสนาม และใช้เซ็นเซอร์ GP-2Y0A41 เพื่อตรวจหาคู่ต่อสู้

การเชื่อมต่อเซ็นเซอร์เข้ากับหุ่นยนต์
1. เชื่อมต่อมอเตอร์ DC ทางซ้ายของหุ่นยนต์ เข้ากับพอร์ตมอเตอร์ 1 และ 2
2. เชื่อมต่อมอเตอร์ DC ทางขวาของหุ่นยนต์ เข้ากับพอร์ตมอเตอร์ 3 และ 4
3. นำเซ็นเซอร์ ZX-03 ทางซ้ายของหุ่นยนต์มาเสียบเข้ากับพอร์ต Analog 1 และเซ็นเซอร์ทางขวาของหุ่นยนต์เสียบเข้ากับ Analog 2
4. เชื่อมต่อเซ็นเซอร์ GP-2Y0A41 เข้ากับพอร์ต Analog 3


เมื่อเชื่อมต่อสายตามขั้นตอนเสร็จแล้วต่อไปก็จะเป็นการสร้างบล็อคเพื่อให้หุ่นยนต์ทำงาน
การสร้างบล็อคโดยใช้ iBlockly กับหุ่นยนต์ Sumo
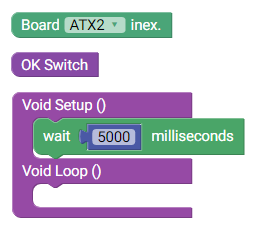
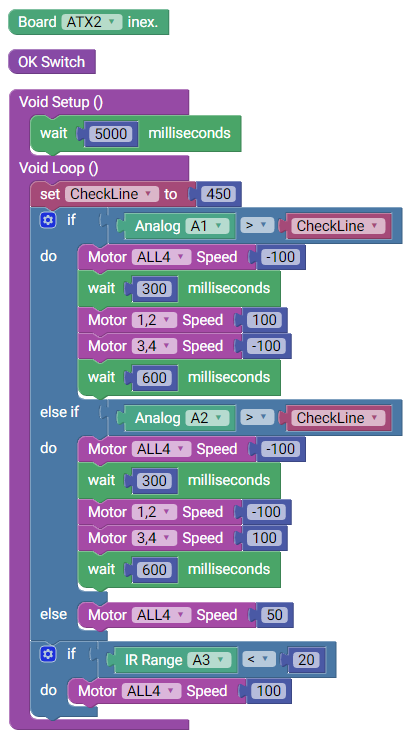
1. ลากบล็อกเพื่อเลือกใช้ไลบรารีของบอร์ดที่เรากำลังใช้งานอยู่ บล็อค OK Switch และเมื่อกด Switch ให้รอ 5 วินาที เพื่อให้หุ่นยนต์ทำงาน ตามกติกาของซูโม่
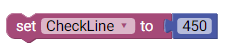
2. สร้างตัวแปรขึ้นมา 1 ตัว ชื่อว่า CheckLine เพื่อเช็คค่าของ ZX-03 ในการตรวจจับเส้นสีขาว ค่าอยู่ที่ 450
3. สร้างเงื่อนไข if else เพื่อทำการเช็คเส้นเมื่อเจอเส้นขาวค่าจะมากกว่า 450 จะทำให้หุ่นยนต์เดินถอยหลัง และหมุนซ้ายขวา เซ็นเซอร์ทางซ้ายเสียบกับ Analog 1 เซ็นเซอร์ขวาเสียบกับ Analog 2 และเมื่อค่าเซ็นเซอร์น้อยกว่า 450 ให้หุ่นยนต์เดินหน้าด้วยความเร็ว 50
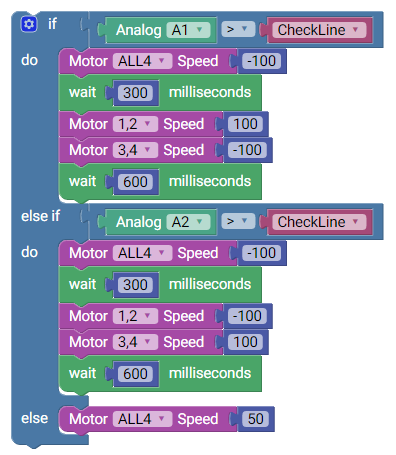
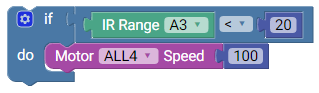
4. เงื่อนไขตรวจจับหุ่นยนต์คู่ต่อสู้โดยใช้เซ็นเซอร์ GP-2Y0A41 เสียบกับช่อง Analog 3 เมื่อเซ็นเซอร์เจอคู่ต่อสู้อยู่ในระยะไม่เกิน 20 เซนติเมตรจะทำการเดินหน้าชนด้วยความเร็ว 100
5. โค้ดสำเร็จทั้งหมดเมื่อนำมารวมกัน
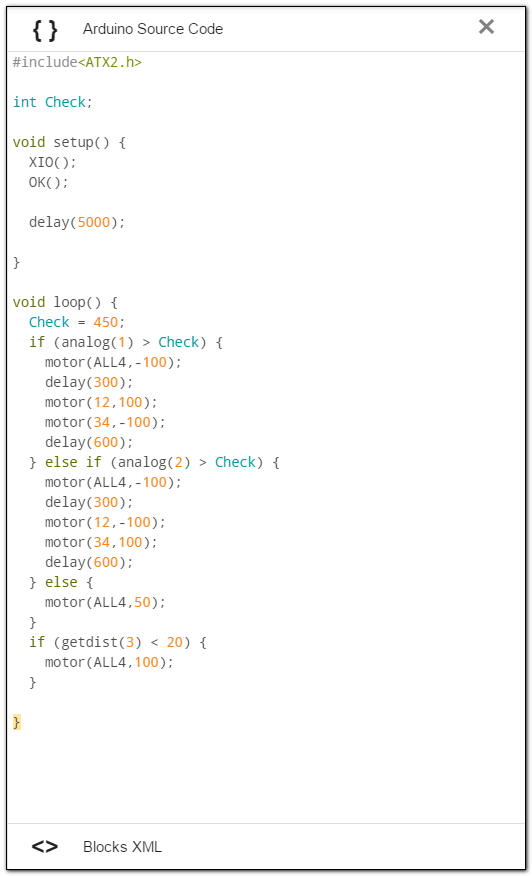
โค้ดที่จะแสดงออกมา
วิดีโอการสร้างบล็อค (Full Screen)
หุ่นยนต์ซูโม่จะทำงานโดยการกดปุ่ม OK เเล้วรอ 5 วินาทีตามกติการของซูโม่ หลังจาก 5 วินาทีเเล้วทำงานโดยการวิ่งหาคู่ต่อสู้ ถ้าไม่เจอคู่ต่อสู้จะวิ่งไปที่ขอบของสนาม จะมีเซ็นเซอร์ ZX-03 เพื่อทำการเช็คขอบสนามสีขวา เมื่อเจอขอบขาวจะมีการถอยหลัง เเละหมุนตัวกลับหลังเพื่อหันหน้าเข้าสนามหาคู่ต่อสู้ต่อไป เเละทันใดนั้นถ้าเซ็นเซอร์ GP-2Y0A41 เจอคู่ต่อสู้ หุ่นยนต์ซูโม่จะวิ่งไปที่คู่ต่อสู้ด้วยความเร็วสูงสุดเพื่อดันคู่ต่อสู้ตกสนาม