
EVO24V50 เป็นบอร์ดขับมอเตอร์ที่ใช้ MOSFET ต่อแบบ H-bridge มีความทนทาน เชื่อมต่อได้หลากหลายรูปแบบ ควบคุมการทำงานด้วย ไมโครคอนโทรลเลอร์ สามารถขับกระแสต่อเนื่องได้สูงสุดถึง 36A และมากถึง 50A ชั่วขณะ รองรับไฟเลี้ยงสูงสุดถึง 42V แยกสัญญาณด้วย Opto-Isolator มีระบบป้องกันการต่อไฟเลี้ยงกลับขั้ว ระบบตัดการทำงานเมื่ออุณหภูมิสูงเกินไป และวงจรป้องกันความเสียหายเมื่อระบบควบคุมหลักมีปัญหา
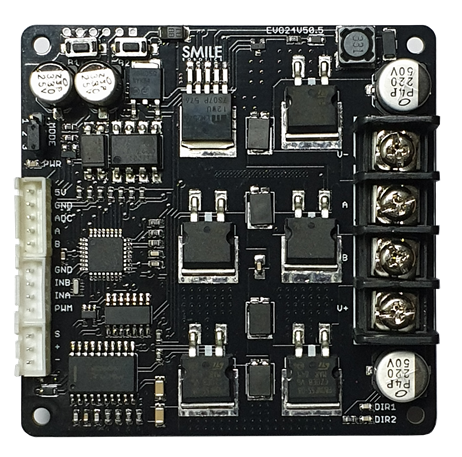
ด้านหน้า
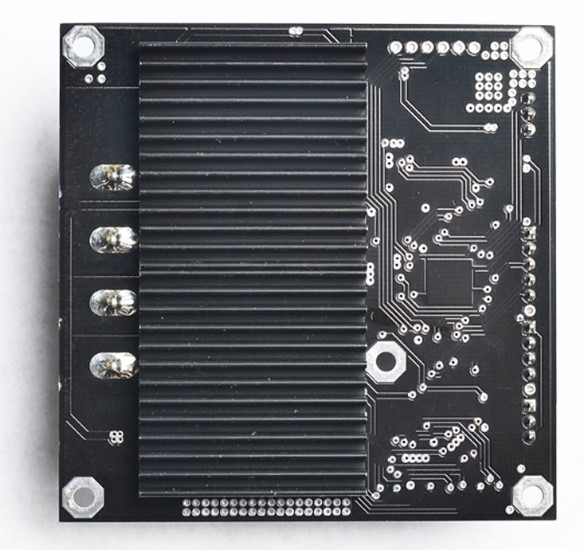
ด้านหลัง
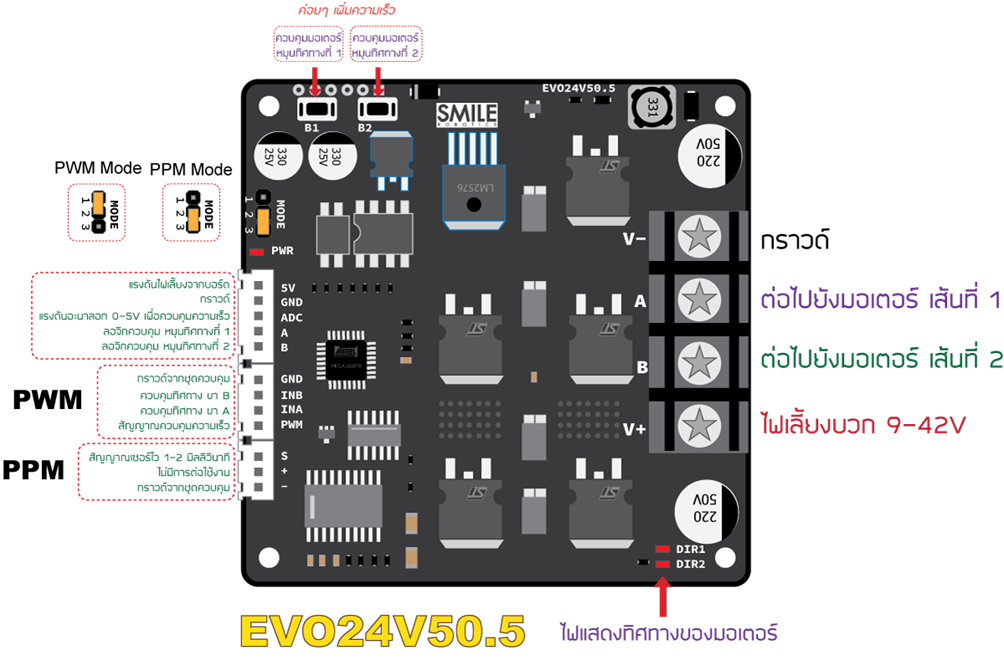
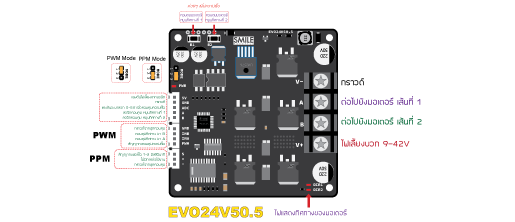
จุดเชื่อมต่อและหน้าที่การทำงาน
คุณสมบัติ
• H-bridge MOSFET driver
• จ่ายกระแสชั่วขณะมากกว่า 50A
• จ่ายกระแสต่อเนื่อง 36A ที่แรงดัน 24V
• ทำงานที่ไฟเลี้ยง 9-42 V
• แรงดันเอาต์พุตสูงสุดเท่ากับ 0.98 x VCC
• มีโหมดการเชื่อมต่อหลายรูปแบบ ADC Mode / PWM Mode / PPM Mode
• แยกสัญญาณควบคุมไฟฟ้าด้วย Opto Isolator
• แสดงทิศทางการหมุนด้วย LED 2 ดวง
• มีวงจรป้องกันการจ่ายไฟเลี้ยงกลับขั้ว
• ตัดการทำงานเมื่อมีอุณหภูมิสูงเกินกว่า 110 องศา
• ติดตั้งแผ่นระบายความร้อนมาพร้อม
• ขนาดแผ่นวงจรพิมพ์ 80 x 80 มิลลิเมตร
• น้ำหนัก 85 กรัม
โหมดการทำงาน
บอร์ดจะถูกแบ่งออกเป็น 3 โหมด ตามรูปแบบการต่อใช้งาน ดังนี้
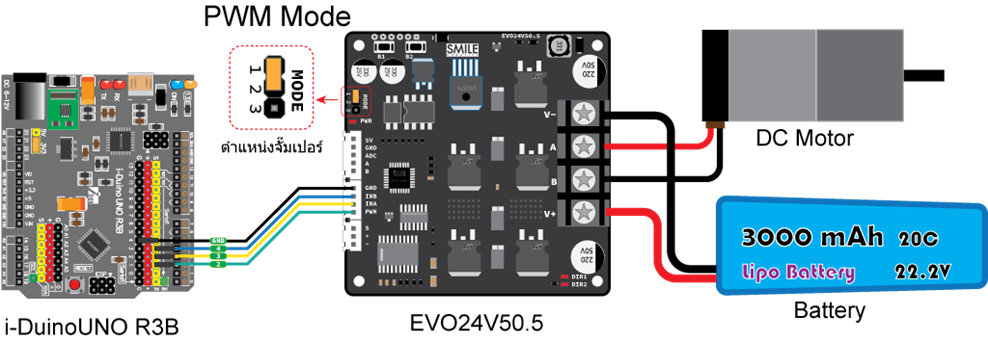
PWM Mode
โหมดเชื่อมต่อตรงกับไมโครคอนโทรลเลอร์ ใช้ PWM (Pulse Width Modulation) ในการควบคุมความเร็ว ควบคุมทิศทางด้วยขา INA และ INB โหมดนี้รองรับความถี่สัญญาณ PWM ได้สูงสุดถึง 5 KHz
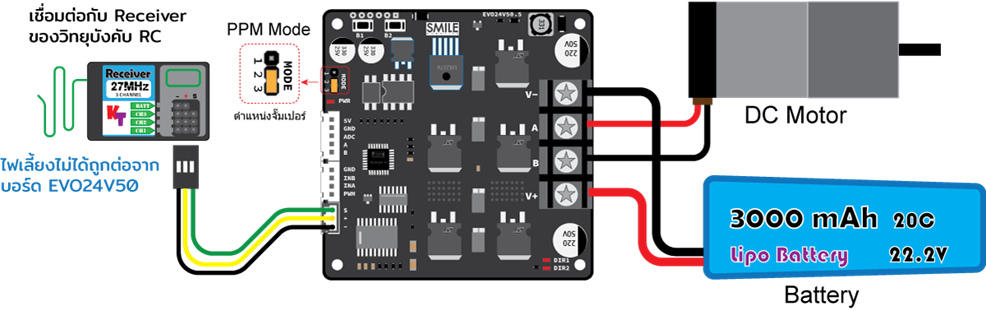
PPM Mode
เป็นการสั่งงานด้วยสัญญาณ Pulse ซึ่งมีความกว้าง 1ms.-2ms. ในการควบคุมความเร็วและทิศทางเช่นเดียวกันกับ R/C Servo โดยทั่วไปใช้สั่งงานผ่าน R/C Receiver ทำให้สามารถใช้รีโมทคอนโทรล R/C ทั่วไปในการควบคุมการทำงานของมอเตอร์ได้โดยตรง
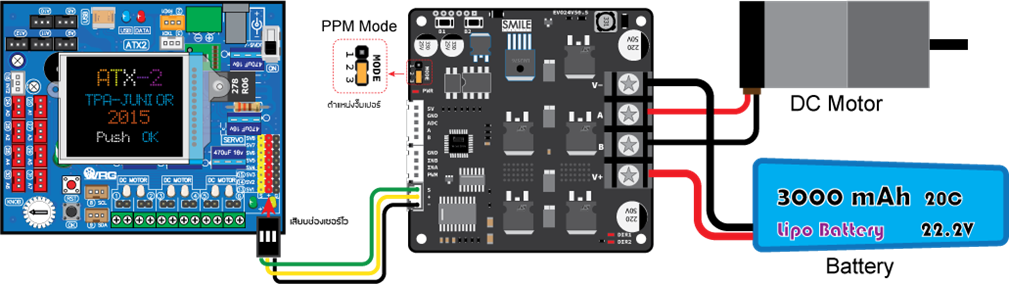
อีกทั้งสามารถใช้ไมโครคอนโทรลเลอร์ สร้างสัญญาณ Pulse เพื่อควบคุมบอร์ดขับมอเตอร์พร้อมกันหลายตัวโดยใช้สายไฟจำนวนน้อยลงได้อีกด้วย โดยในโหมดนี้บอร์ดขับมอเตอร์จะสร้างสัญญาณ PWM ไปยังมอเตอร์ที่ความถี่ 500 Hz
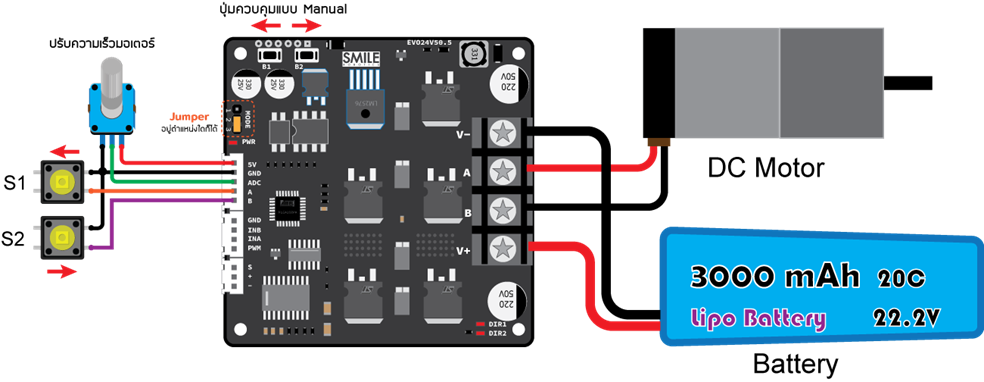
Analog Mode
เป็นการสั่งงานด้วยสัญญาณที่มีระดับแรงดัน 0-5V เพื่อใช้ควบคุมความเร็ว และใช้สัญญาณลอจิกป้อนให้กับ A และ B (โหมดใช้งานนี้ไม่ผ่านระบบแยกสัญญาณด้วย Opto-Isolator) การต่อใช้งานที่เหมาะสมคือการต่อตัวต้านทานแบบปรับค่าได้ (Variable Resistor) เป็นวงจรแบ่งแรงดัน เพื่อปรับระดับแรงดัน ให้กับสัญญาณ ADC และสวิตช์ เพื่อป้อนลอจิก 0 ให้กับสัญญาณ A หรือ B เข้ากับวงจร เพื่อควบคุมความเร็วและทิศทางของมอเตอร์ได้โดยตรง ในโหมดนี้ จะสามารถแทรกแซงระบบเพื่อควบคุมการทำงานได้ทันที ไม่ว่าบอร์ดขับมอเตอร์นั้นจะทำงานอยู่ในโหมดใดก็ตาม โดยทั่วไปใช้ควบคุมการทำงานของมอเตอร์ด้วยมือ ในขณะที่ทำการ Setup หรือ Reset อุปกรณ์
ตอนนี้ขอแนะนำประมาณนี้ก่อนครับ ตอนหน้าค่อยมาทดลองใช้งานกัน