

POP-X2 Rover บทที่ 3 อุปกรณ์อินพุตเอาต์พุตบน POP-X2
การสร้างเสียงออกลำโพง บอร์ด POP-X2 ติดตั้งลำโพงเปียโซขนาดเล็กไว้ด้านล่างของจอ GLCD โดยลำโพงเปียโซสาม …
การสร้างเสียงออกลำโพง บอร์ด POP-X2 ติดตั้งลำโพงเปียโซขนาดเล็กไว้ด้านล่างของจอ GLCD โดยลำโพงเปียโซสาม …
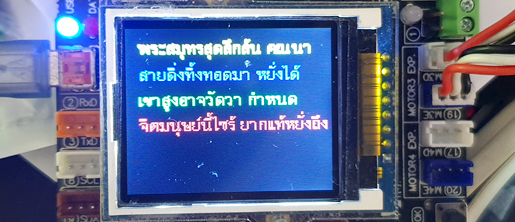
จอแสดงผล GLCD เป็นจอที่สามารถแสดงผลกราฟิก ด้วยความละเอียดจอ 128×160 พิกเซล ทั้งยังสามารถแสดงตัว …
แนะนำตัว POP-X2 เป็นบอร์ดสมองกลที่รวบรวมเอา วงจรขับมอเตอร์ ส่วนแสดงผลและส่วนติดต่อกับอุปกรณ์อินพุตเอ …
เซอร์โวมอเตอร์ Dynamixel AX-12A จาก Robotis เป็นมอเตอร์ที่มีไมโครคอนโทรลเลอร์และวงจรขับอยู่ในตัว มีโ …
การขับมอเตอร์ขนาดใหญ่ด้วยบอร์ด KidBright หรือ OpenKB จะไม่ใช่เรื่องยากอีกต่อไป เมื่อใช้บอร์ด Dual_EV …
IPST-SE, POP-X2, POP-7, ATX2 ต่างก็มีมาตรฐานจอภาพแบบเดียวกันคือ จอ GLCD ขนาด 128×160 พิกเซล การ …
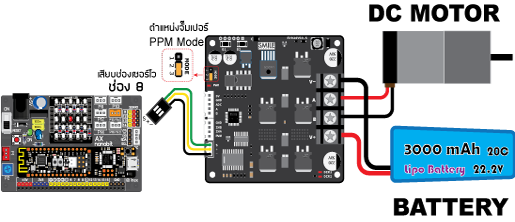
[ อ่านตอนที่ 1 ] ในโหมดนี้สามารถใช้บอร์ดไมโครคอนโทรลเลอร์ใด ๆ ก็ได้ในการเชื่อมต่อ โดยอาศับการปรับค่า …
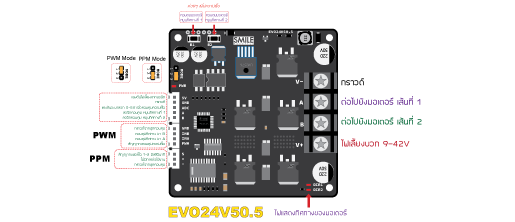
EVO24V50 เป็นบอร์ดขับมอเตอร์ที่ใช้ MOSFET ต่อแบบ H-bridge มีความทนทาน เชื่อมต่อได้หลากหลายรูปแบบ ควบ …
บอร์ดควบคุมหุ่นยนต์ ATX2 ,POP-X2 ,POP-7 ,IPST-SE ทุกตัวมีสวิตช์ OK และมีคำสั่ง OK รองรับ ปัญหาคือบาง …
ต่อจากบทความที่แล้ว ที่พูดถึงการควบคุม Sumo-BOT ในระบบควบคุมมือ ในคราวนี้เราจะมาพูดถึงการค …



![[OpenKB][KidBright][KidBrightIDE] ขับมอเตอร์กระแสสูงด้วยบอร์ด Dual-EVO24X9 I2C+R/C](https://doc.inex.co.th/wp-content/uploads/2021/05/kidbright-openkb-dual-Evo24x9.png)
![[ATX2] ใช้ ZX-SWITCH01 แทนสวิตช์ OK](https://doc.inex.co.th/wp-content/uploads/2020/04/ATX2-With-2-ZX-Switch01-Head.png)