POP-X2 Rover บทที่ 9 สร้างแอปบน Android ด้วย App Inventor
ควบคุม POP-X2 Rover แบบไร้สายด้วย BlueStick และการสร้างแอปบนสมาร์ตโฟนแอนดรอยด์ด้วย App Inventor เริ่ …
ควบคุม POP-X2 Rover แบบไร้สายด้วย BlueStick และการสร้างแอปบนสมาร์ตโฟนแอนดรอยด์ด้วย App Inventor เริ่ …
เพื่อควบคุมการเคลื่อนที่ของ POP-X2 Rover จะเลือกใช้การสื่อสารผ่านบลูทูธ ซึ่งเลือกใช้ผ่านบอร์ด ZX-Blu …
แขนจับ Gripper-x แขนจับ Gripper-X ประกอบไปด้วยเซอร์โวมอเตอร์ 2 ตัว ตัวแรกเชื่อมต่อกับโครงสร้างที่ทำห …
แผงวงจรตรวจจับการสะท้อนแสงอินฟราเรด ZX-03 ZX-03 ใช้ตัวตรวจจับอินฟราเรดรุ่น TCRT5000 จะมีตัวรับและตัว …
โมดูลวัดระยะทางด้วยอัลตร้าโซนิค ZX-HCSR04 ZX-HCSR04 เป็นโมดูลวัดระยะทางที่ใช้หลักการสะท้อนของคลื่นอั …
สร้างและทดสอบการขับเคลื่อนเบื้องต้น ชุด POP-X2 Rover มีอุปกรณ์สำหรับสร้างรถหรือหุ่นยนต์อัตโนมัติ ที่ …
การสร้างเสียงออกลำโพง บอร์ด POP-X2 ติดตั้งลำโพงเปียโซขนาดเล็กไว้ด้านล่างของจอ GLCD โดยลำโพงเปียโซสาม …
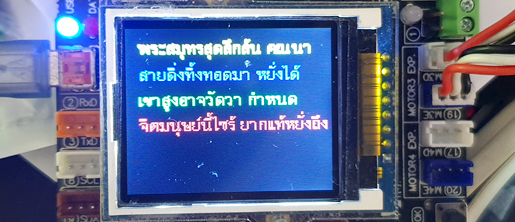
จอแสดงผล GLCD เป็นจอที่สามารถแสดงผลกราฟิก ด้วยความละเอียดจอ 128×160 พิกเซล ทั้งยังสามารถแสดงตัว …
แนะนำตัว POP-X2 เป็นบอร์ดสมองกลที่รวบรวมเอา วงจรขับมอเตอร์ ส่วนแสดงผลและส่วนติดต่อกับอุปกรณ์อินพุตเอ …
IPST-SE, POP-X2, POP-7, ATX2 ต่างก็มีมาตรฐานจอภาพแบบเดียวกันคือ จอ GLCD ขนาด 128×160 พิกเซล การ …